




Taylor迭代可以在噪声复杂的情况下,取得良好的定位效果,广泛应用于TDOA的解算过程中,但如果TOA的情况下,噪声呈现非高斯,可是可以使用Taylor的,本文给出其二维平面上的例程。
参考文献:《基于Taylor-Chan算法的改进UWB室内三维定位方法》
简介
Taylor 方法(又称迭代线性化方法)用于求解非线性测距模型的最小二乘解,通过在当前估计点处对测距方程进行一阶泰勒展开,线性化后利用最小二乘(LS)迭代更新位置估计,直到收敛。
- 适用场景:锚点数目 N ≥ 3 N\ge 3 N≥3(二维),测量为 TOA(Time of Arrival),噪声满足高斯分布近似。
- 优点:实现简单,计算量低;收敛速度与初值选取有关。
- 参考文献:《基于 Taylor–Chan 算法的改进 UWB 室内三维定位方法》。
-
初始化
num_stations = 4; % 锚点数 std_var1 = 1e-11; % TOA 时间噪声标准差 stations_position = 100*rand(num_stations,2); c = 3e8; % 光速 position = 5*ones(1,2)+5*randn(1,2); % 待定位真值- 随机生成 4 个锚点位置;
- 随机生成目标真实坐标;
- 通过 Δ t = ∥ x − s i ∥ / c + ε i \Delta t = \|\mathbf{x}-\mathbf{s}_i\|/c + \varepsilon_i Δt=∥x−si∥/c+εi 构造有噪 TOA 测量。
-
TOA 测量建模
delta = ones(N,1)*position - stations_position; r_ideal = sqrt(sum(delta.^2,2)); delta_t = r_ideal/c + std_var1*randn(size(r_ideal)); r = delta_t * c;- 计算理想距离 r i ideal = ∥ x − s i ∥ r_i^\text{ideal} = \|\mathbf{x}-\mathbf{s}_i\| riideal=∥x−si∥;
- 加入测时误差 ε i ∼ N ( 0 , σ t 2 ) \varepsilon_i\sim\mathcal{N}(0,\sigma_t^2) εi∼N(0,σt2),得到带噪测距 r i r_i ri。
-
迭代线性化(Taylor 展开)
-
初值选取:取所有锚点坐标平均值
x ( 0 ) = 1 N ∑ i = 1 N s i . \mathbf{x}^{(0)} = \frac{1}{N}\sum_{i=1}^N\mathbf{s}_i. x(0)=N1i=1∑Nsi.
-
第 k k k 次迭代:
-
计算残差向量
B i = ∥ x ( k ) − s i ∥ − r i , i = 1 , … , N . B_i = \|\mathbf{x}^{(k)}-\mathbf{s}_i\| - r_i, \quad i=1,\dots,N. Bi=∥x(k)−si∥−ri,i=1,…,N.
-
构造雅可比矩阵
A i , : = [ x ( k ) − s i , x ∥ x ( k ) − s i ∥ , y ( k ) − s i , y ∥ x ( k ) − s i ∥ ] . A_{i,:} = \left[\frac{x^{(k)}-s_{i,x}}{\|\mathbf{x}^{(k)}-\mathbf{s}_i\|},\; \frac{y^{(k)}-s_{i,y}}{\|\mathbf{x}^{(k)}-\mathbf{s}_i\|}\right]. Ai,:=[∥x(k)−si∥x(k)−si,x,∥x(k)−si∥y(k)−si,y].
-
线性最小二乘更新
Δ x = ( A T A ) − 1 A T B , x ( k + 1 ) = x ( k ) + Δ x . \Delta\mathbf{x} = (A^T A)^{-1} A^T \, \mathbf{B}, \qquad \mathbf{x}^{(k+1)} = \mathbf{x}^{(k)} + \Delta\mathbf{x}. Δx=(ATA)−1ATB,x(k+1)=x(k)+Δx.
-
判断收敛: ∥ Δ x ∥ < ϵ \|\Delta\mathbf{x}\|<\epsilon ∥Δx∥<ϵ 或达到最大迭代次数。
-
-
-
结果可视化与输出
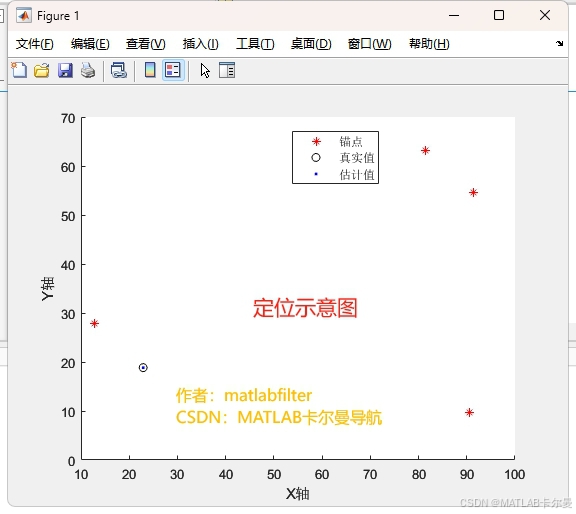
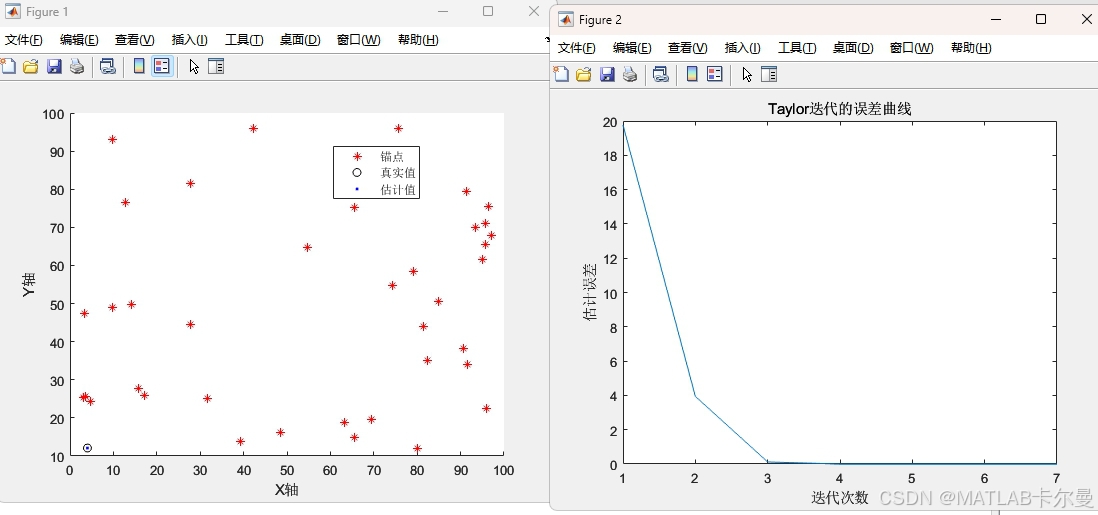
- 绘制锚点、真实位置与迭代后估计位置;
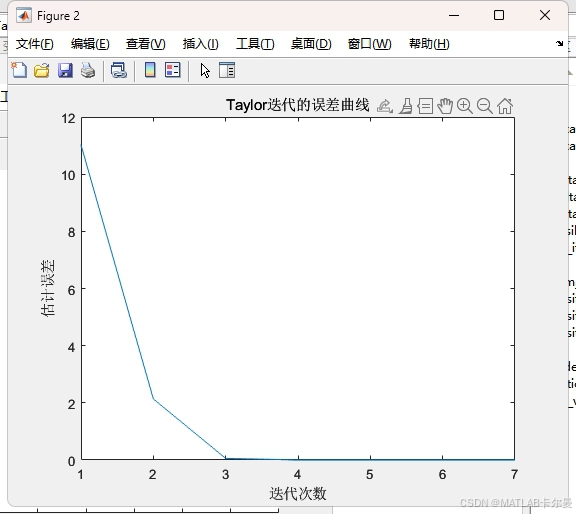
- 画出迭代误差随迭代次数的曲线;
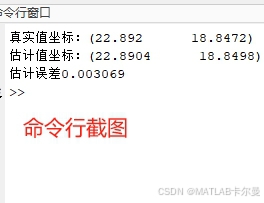
- 在命令行打印最终估计值及误差。
更多细节,见程序中的注释,具有丰富的中文注释
运行结果
4个锚点的示例
定位示意图:
定位结果:
迭代时的误差曲线:
40个锚点的示例
matlab源代码
部分代码如下:
% Taylor方法解算TOA,二维目标、N个锚点
% 参考文献:《基于Taylor-Chan算法的改进UWB室内三维定位方法》
% 作者:matlabfilter
% 2025-07-12/Ver1
%% 初始化
clc;clear;close all;
rng(0);
% 定义参数和待测点位置
num_stations = 4; % 基站数量(锚点数量)
std_var1 = 1e-11; %TOA时间误差(标准差)
% 固定基站位置
stations_position = 100*rand(num_stations,2);
c = 3e8;
% 生成待定位点坐标
position = 5*ones(1,2)+5*randn(1,2);
%% TOA 建模
%% 迭代过程
% 基站均值作为初值
%% 绘图
%% 坐标输出
修改基站数量的代码:

完整代码见对应的付费专栏:https://blog.youkuaiyun.com/callmeup/article/details/149293309?spm=1011.2415.3001.5331
或单个代码的下载链接:https://download.youkuaiyun.com/download/callmeup/91359667
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











