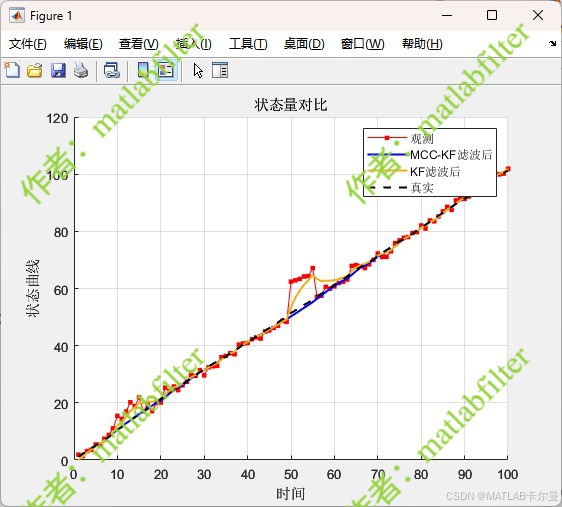
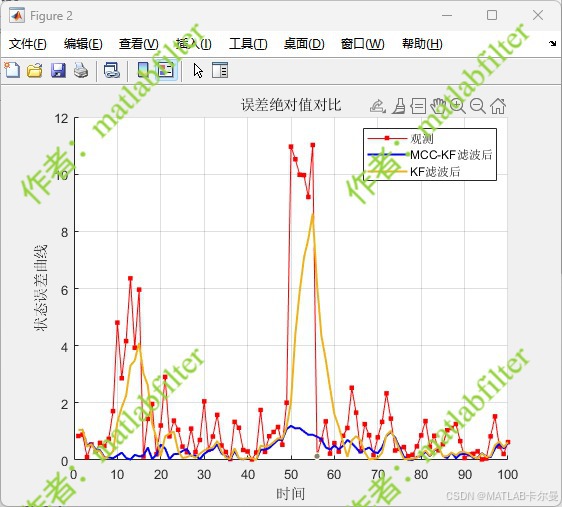
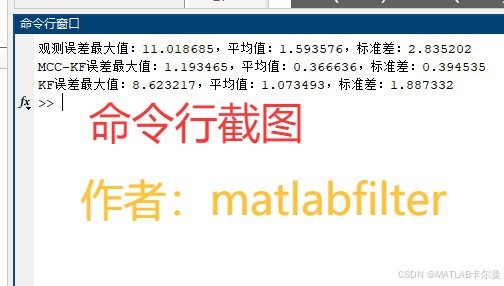
本文所述的代码实现了一种基于最大相关熵准则(Maximum Correntropy Criterion, MCC)的鲁棒性卡尔曼滤波算法(MCC-KF),重点解决传统卡尔曼滤波在观测噪声存在异常值时估计精度下降的问题。通过引入高斯核函数对残差进行加权处理,有效降低了异常观测值对状态估计的干扰。订阅专栏后,可获得完整的MATLAB源代码 文章目录 运行结果 MATLAB源代码 代码说明 相关公式 流程图表示(Mermaid) 运行结果 滤波结果: 误差绝对值对比: 命令行截图: 从图中可以观察到, M C C MCC MCC卡尔曼滤波能够有效抑制异常值对状态估计的影响。 MATLAB源代码 下面的代码粘贴到matlab空脚本中,直接运行即可:




 996
1374
1255
157
996
1374
1255
157

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言






 订阅专栏 解锁全文
订阅专栏 解锁全文

























