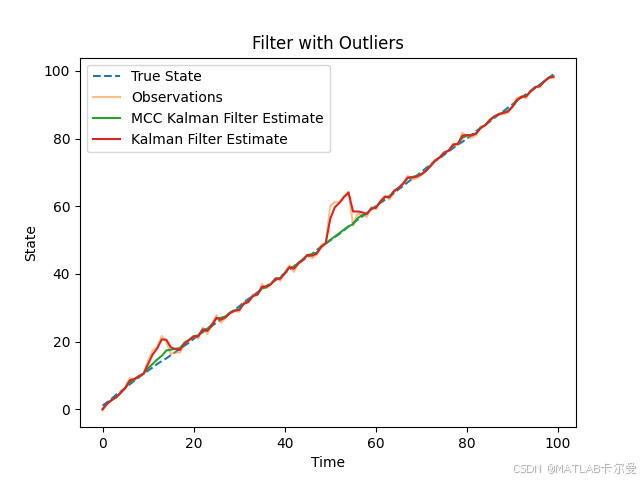
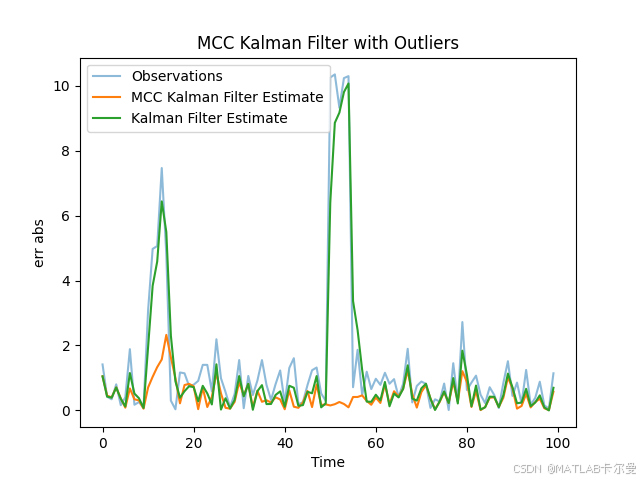
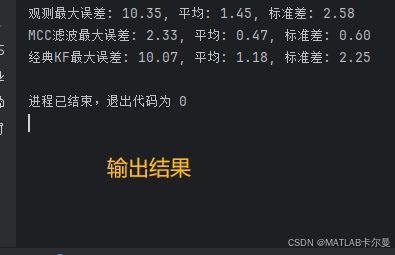
本代码实现了 最大相关熵卡尔曼滤波(MCC-KF) 与经典卡尔曼滤波(KF)的对比仿真,重点验证MCC-KF在存在异常观测值场景下的鲁棒性改进。通过高斯核函数动态加权残差,MCC-KF能有效抑制异常值对状态估计的影响。 文章目录 运行结果 Python源代码 核心算法原理 最大相关熵准则(MCC) MCC-KF 改进步骤 代码模块解析 高斯核函数 MCC-KF 实现 测试数据生成 改进方向 总结 运行结果 状态曲线: 误差曲线: 另外输出各方法得到的误差特性: 上面的结果能看出来,MCC滤波的误差最小,对于两处观测值异常的屏蔽也是最好的。 Python源代码 以下代码复制粘贴到空脚本中即可直接运行: import numpy as np # 高斯核函数 def gaussian_kernel






 订阅专栏 解锁全文
订阅专栏 解锁全文



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








