





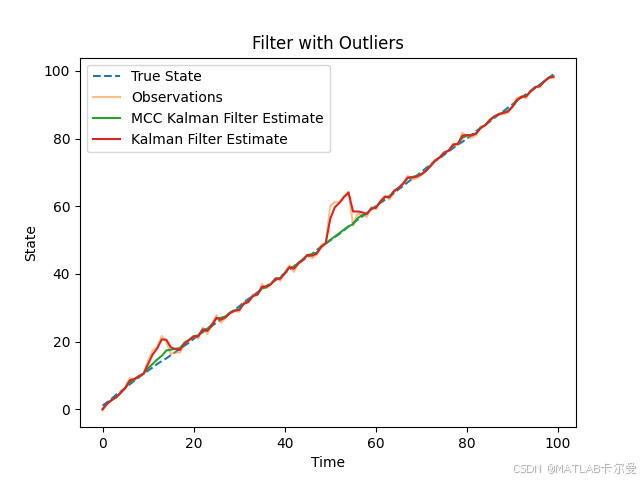
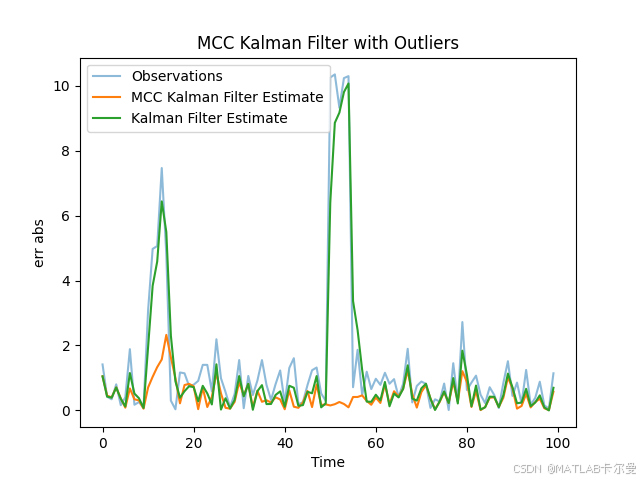
本代码实现了**最大相关熵卡尔曼滤波(MCC-KF)**与经典卡尔曼滤波(KF)的对比仿真,重点验证MCC-KF在存在异常观测值场景下的鲁棒性改进。通过高斯核函数动态加权残差,MCC-KF能有效抑制异常值对状态估计的影响。
运行结果
状态曲线:
误差曲线:
Python源代码
以下代码复制粘贴到空脚本中即可直接运行:
import numpy as np
# 高斯核函数
def gaussian_kernel(x, sigma):
return np.exp(-x**2 / (2 * sigma**2))
# MCC 卡尔曼滤波
def mcc_kalman_filter(z, F, H, Q, R, x0, P0, sigma):
"""
参数:
z: 观测值序列 (numpy array, shape = [T, 1])
F: 状态转移矩阵 (numpy array, shape = [n, n])
H: 观测矩阵 (numpy array, shape = [m, n])
Q: 过程噪声协方差矩阵 (numpy array, shape = [n, n])
R: 观测噪声协方差矩阵 (numpy array, shape = [m, m])
x0: 初始状态估计 (numpy array, shape = [n, 1])
P0: 初始协方差矩阵 (numpy array, shape = [n, n])
sigma: MCC 高斯核的带宽参数
返回:
x_est_MCC: 估计的状态序列 (numpy array, shape = [T, n])
"""
# 初始化
T = len(z) # 时间序列长度
n = x0.shape[0] # 状态维度
x_est_MCC = np.zeros((T, n, 1)) # 保存状态估计
x_est_MCC[0] = x0
P = P0
for t in range(1, T):
# 预测
x_pred = F @ x_est_MCC[t - 1] +1 # 预测状态
P_pred = F @ P @ F.T + Q # 预测协方差
# 计算残差
y = z[t] - H @ x_pred
# MCC 权重
w = gaussian_kernel(y, sigma)
# 卡尔曼增益(基于 MCC)
S = H @ P_pred @ H.T + R
K = P_pred @ H.T @ np.linalg.inv(S)
# 更新状态与协方差
x_est_MCC[t] = x_pred + K @ (w * y)
P = P_pred - K @ H @ P_pred
return x_est_MCC
# 经典卡尔曼滤波
def kalman_filter(z, F, H, Q, R, x0, P0, sigma):
"""
参数:
z: 观测值序列 (numpy array, shape = [T, 1])
F: 状态转移矩阵 (numpy array, shape = [n, n])
H: 观测矩阵 (numpy array, shape = [m, n])
Q: 过程噪声协方差矩阵 (numpy array, shape = [n, n])
R: 观测噪声协方差矩阵 (numpy array, shape = [m, m])
x0: 初始状态估计 (numpy array, shape = [n, 1])
P0: 初始协方差矩阵 (numpy array, shape = [n, n])
sigma: MCC 高斯核的带宽参数
返回:
x_est_KF: 估计的状态序列 (numpy array, shape = [T, n])
"""
# 初始化
T = len(z) # 时间序列长度
n = x0.shape[0] # 状态维度
x_est_KF = np.zeros((T, n, 1)) # 保存状态估计
x_est_KF[0] = x0
P = P0
for t in range(1, T):
# 预测
x_pred = F @ x_est_KF[t - 1] +1 # 预测状态
P_pred = F @ P @ F.T + Q # 预测协方差
# 计算残差
y = z[t] - H @ x_pred
# MCC 权重
w = gaussian_kernel(y, sigma)
# 卡尔曼增益(基于 MCC)
完整代码的下载链接:https://download.youkuaiyun.com/download/callmeup/90958788
核心算法原理
最大相关熵准则(MCC)
基于信息论中的熵最大化原则,通过高斯核函数赋予残差自适应权重:
w
=
exp
(
−
e
2
2
σ
2
)
w = \exp\left(-\frac{e^2}{2\sigma^2}\right)
w=exp(−2σ2e2)
其中
e
e
e为观测残差,
σ
\sigma
σ为核带宽参数。异常值对应的残差较大时权重降低,从而抑制其影响。
MCC-KF 改进步骤
- 预测环节:与经典KF相同,通过状态转移矩阵 (F) 预测状态和协方差
- 更新环节:引入高斯核函数修正卡尔曼增益,更新公式调整为:
x ^ t = x pred + K ⋅ ( w ⋅ y ) \hat{x}_t = x_{\text{pred}} + K \cdot (w \cdot y) x^t=xpred+K⋅(w⋅y)
相较经典KF的 K ⋅ y K \cdot y K⋅y, w w w作为附加权重压缩异常值。
代码模块解析
高斯核函数
计算残差的权重,核带宽 σ \sigma σ控制对异常值的敏感度。
MCC-KF 实现
def mcc_kalman_filter(z, F, H, Q, R, x0, P0, sigma):
# 核心循环
for t in range(1, T):
# 预测步骤(同经典KF)
y = z[t] - H @ x_pred
w = gaussian_kernel(y, sigma) # 计算权重
x_est_MCC[t] = x_pred + K @ (w * y) # 加权更新
在残差更新环节引入权重 (w),抑制大残差值的影响。
测试数据生成
构造含两段显著异常值的观测序列,测试算法鲁棒性。
改进方向
- 动态核带宽:根据残差统计特性自适应调整 (\sigma)
- 多核函数扩展:使用混合核(如拉普拉斯核)提升复杂噪声适应性
- 工程优化:矩阵运算加速(如Cholesky分解替代直接求逆)
总结
本代码通过对比验证了MCC-KF在异常值场景下的优越性,可作为传感器信号处理、组合导航等领域的鲁棒滤波算法基础框架。实际应用中需结合具体噪声特性调整核参数与系统模型。
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











