




本代码基于 PSINS 工具箱 实现了一个 15 维状态的容积卡尔曼滤波(CKF)算法,用于 SINS/GPS 组合导航系统。该算法在原有仅速度观测的 CKF153 模型基础上改进,新增 位置、航向角 作为观测输入,提升了导航精度。
文章目录
- 运行结果
- 完整代码
- 核心功能
- 代码改进点
- 实现流程
- 关键函数说明
- 运行结果
- 总结
以下是代码的核心功能与实现流程:
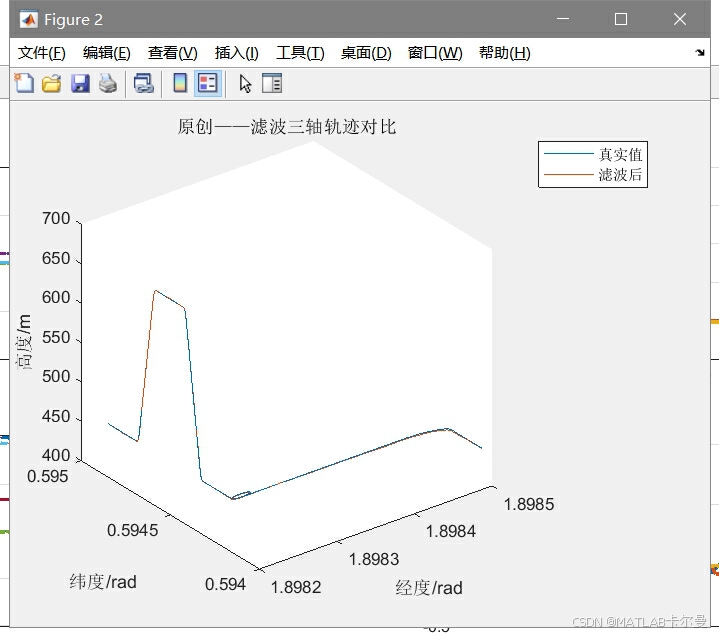
运行结果
三维轨迹:
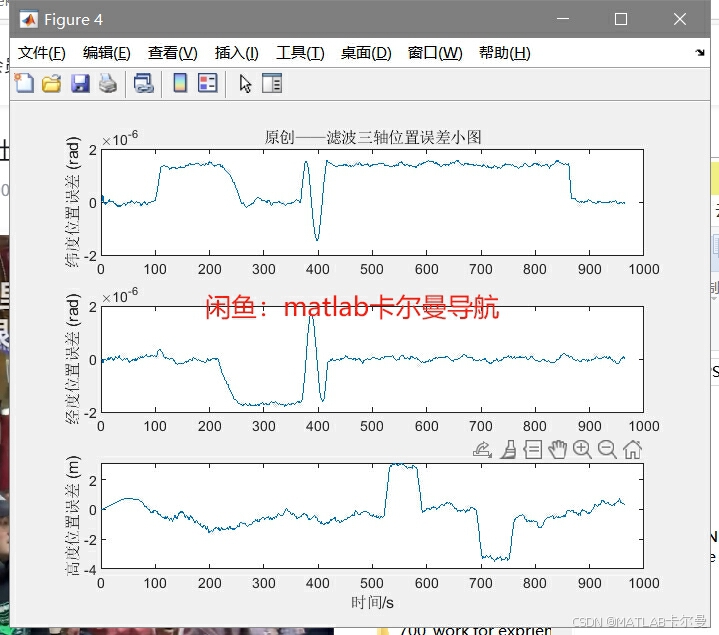
- 三轴位置误差曲线:
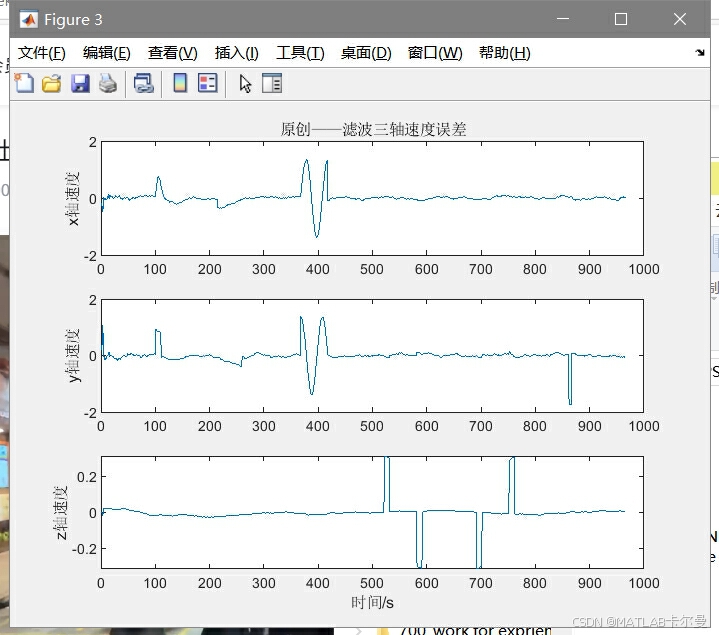
- 三轴速度误差曲线:
完整代码
完整代码如下,在安装了PSINS工具箱后,直接运行即可:
% 【PSINS】位置、速度、航向角为观测的157,CKF。从速度观测的CKF153改进而来
% 2025-02-07/Ver1
% 清空工作空间,清除命令窗口,关闭所有图形窗口
clear;
 订阅专栏 解锁全文
订阅专栏 解锁全文


















 240
240

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











