






本代码基于 PSINS 工具箱 实现了一个 15 维状态的容积卡尔曼滤波(CKF)算法,用于 SINS/GPS 组合导航系统。该算法在原有仅速度观测的 CKF153 模型基础上改进,新增 位置、航向角 作为观测输入,提升了导航精度。
文章目录
- 运行结果
- 核心功能
- 代码改进点
- 实现流程
- 关键函数说明
- 运行结果
- 程序代码
- 总结
以下是代码的核心功能与实现流程:
运行结果
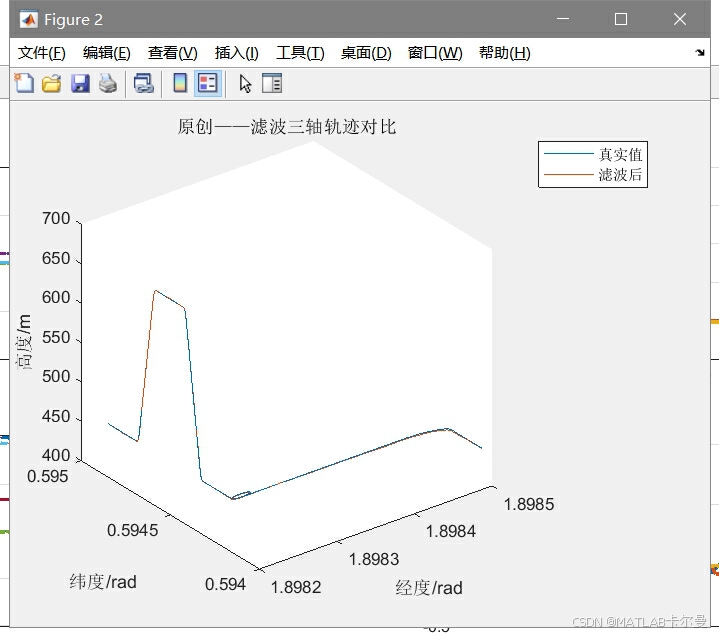
三维轨迹:
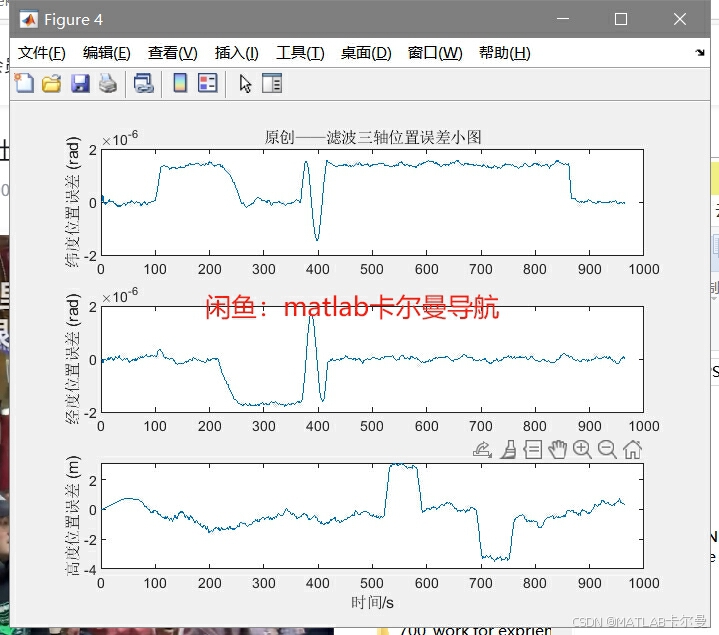
- 三轴位置误差曲线:
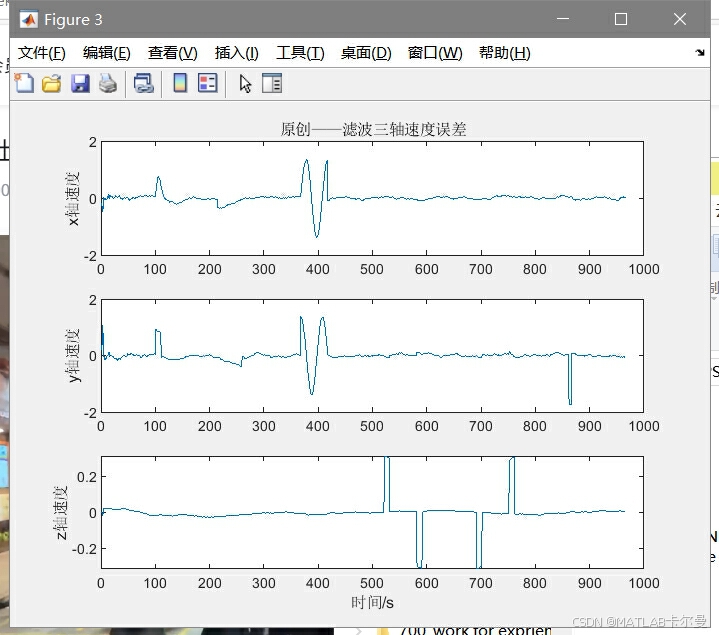
- 三轴速度误差曲线:
核心功能
- 多源数据融合:通过 IMU(惯性测量单元)原始数据与外部观测(GPS 位置、速度、航向角)结合,实现高精度导航解算。
- 误差抑制:利用 CKF 算法处理非线性系统噪声和观测噪声,有效抑制 IMU 累积误差。
- 实时滤波:逐帧处理 IMU 数据,动态更新导航状态(姿态、速度、位置)。
代码改进点
- 观测维度扩展:从仅速度观测(CKF153)升级为 位置+速度+航向角 多维度观测(CKF157),增强系统鲁棒性。
- 自适应滤波:通过
ckf函数实现容积卡尔曼滤波,优化状态估计的数值稳定性。 - 误差反馈机制:
kffeedback将滤波后的误差实时反馈到惯性导航系统(INS),修正导航参数。
实现流程
-
初始化设置
- 加载轨迹数据(
trjfile),设置 IMU 误差模型(imuerrset)。 - 初始化 INS 导航系统(
insinit)和 CKF 滤波器参数(kfinit)。
- 加载轨迹数据(
-
滤波主循环
- INS 机械编排:逐帧处理 IMU 数据,更新姿态、速度、位置(
insupdate)。 - CKF 预测与更新:
- 预测阶段:计算状态转移矩阵(
kffk)。 - 更新阶段:融合航向角、速度、位置观测数据(
ckf函数)。
- 预测阶段:计算状态转移矩阵(
- 状态反馈:将滤波结果反馈到 INS,修正导航误差。
- INS 机械编排:逐帧处理 IMU 数据,更新姿态、速度、位置(
-
结果可视化
- 轨迹对比图:显示真实轨迹与滤波后轨迹的一致性。
- 误差分析图:绘制速度、位置误差曲线及累计概率密度(CDF),量化滤波效果。
- 数值输出:计算 X/Y/Z 轴速度误差的平均值,评估算法性能。
关键函数说明
| 函数名 | 功能描述 |
|---|---|
psinstypedef(153) | 定义导航系统类型(153 状态模型)。 |
imuadderr | 为 IMU 数据添加预设误差(零偏、噪声等)。 |
kfinit | 初始化卡尔曼滤波器参数(状态、噪声协方差等)。 |
ckf | 容积卡尔曼滤波核心算法,处理非线性观测更新。 |
运行结果
- 轨迹精度提升:滤波后轨迹与真实轨迹高度吻合。
- 误差显著降低:X/Y/Z 轴速度误差平均值较未滤波数据明显减小(具体数值见输出)。
- 统计特性优化:累计概率密度图(CDF)显示误差分布更集中,验证算法稳定性。
程序代码
部分代码如下:
% 【PSINS】位置、速度、航向角为观测的157,CKF。从速度观测的CKF153改进而来
% 2025-02-07/Ver1
% 清空工作空间,清除命令窗口,关闭所有图形窗口
clear;clc;close all;
rng(0);
glvs
psinstypedef(153);
trj = trjfile('trj10ms.mat');
% initial settings
[nn, ts, nts] = nnts(2, trj.ts);
% imuerr = imuerrset(0.03, 100, 0.001, 5);
imuerr = imuerrset(8, 14, 0.18, 57);
imu = imuadderr(trj.imu, imuerr); % imuplot(imu);
davp0 = avperrset([1;1;10]*60, 0, 0*[1;1;3]);
%% 速度观测UKF
ins = insinit(avpadderr(trj.avp0,davp0), ts);
完整代码下载链接:https://download.youkuaiyun.com/download/callmeup/90354209
在安装了PSINS工具箱后,直接运行即可
总结
本代码通过扩展观测维度和改进 CKF 算法,实现了高精度的 SINS/GPS 组合导航,适用于无人机、自动驾驶等场景。实验结果表明,滤波后导航误差显著降低,验证了方法的有效性。代码结构清晰,涵盖数据加载、滤波处理、结果分析全流程,可作为惯性导航算法的参考实现。
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者


















 442
442

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











