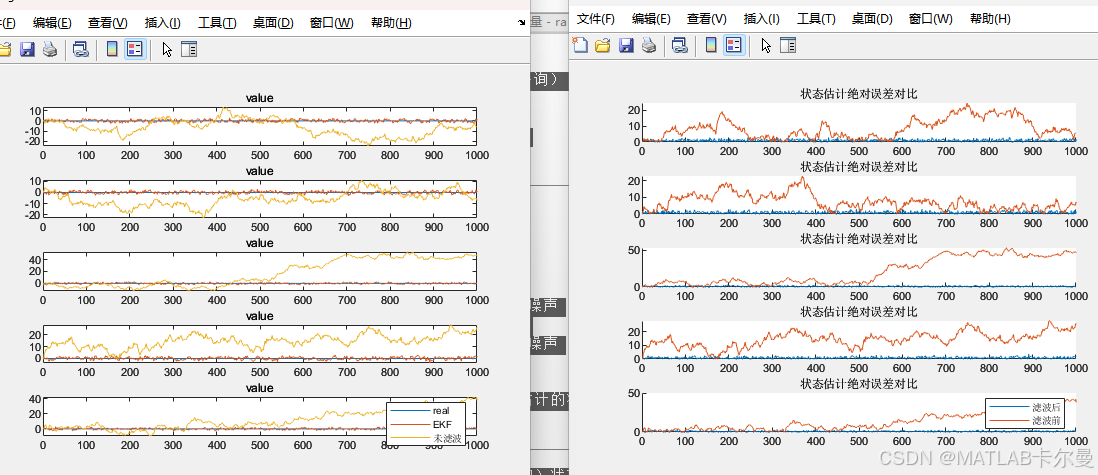
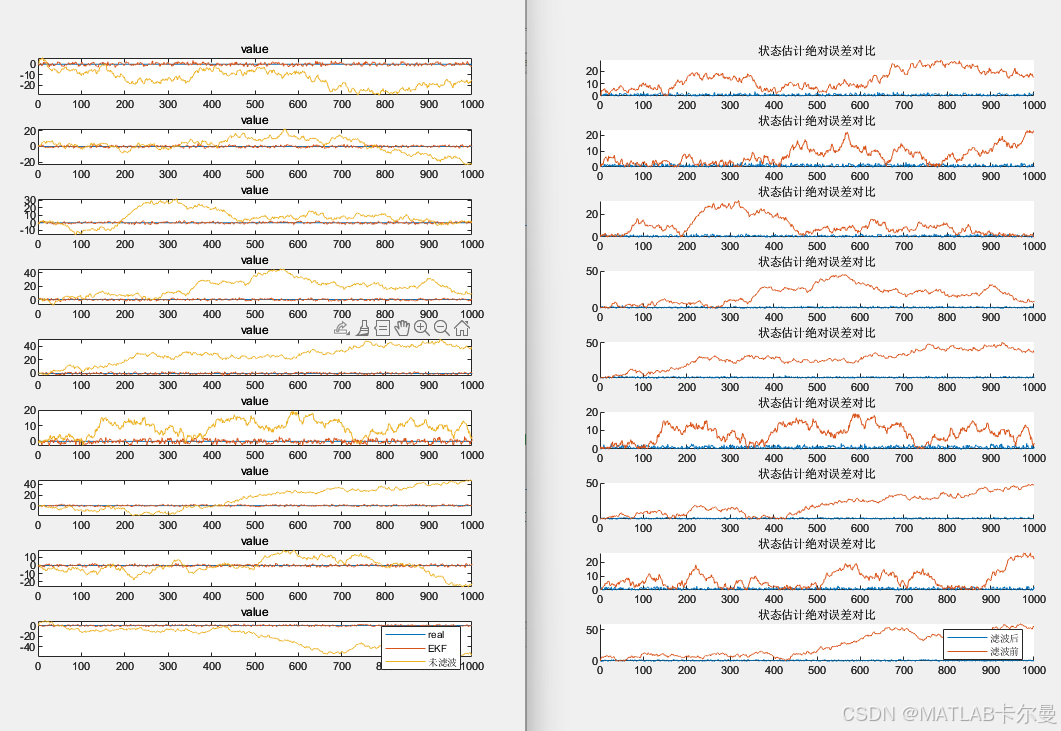
该 M A T L A B MATLAB MATLAB代码实现了扩展卡尔曼滤波( E K F EKF EKF)算法,用于对多维状态进行估计和滤波。旨在处理具有过程噪声和观测噪声的动态系统。通过对比未滤波状态和EKF估计值,展示了滤波效果。如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者 文章目录 运行结果 源代码 主要功能 代码结构 适用场景 运行结果 5维的情况: 9维的情况: 源代码 % EKF 自动匹配维度 % Evand©2023-2024 % 2024-12-26/Ver1 clear; clc; close all;% 清除变量、命令行和图形窗口 rng(0





 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言







 订阅专栏 解锁全文
订阅专栏 解锁全文


















 253
253







