






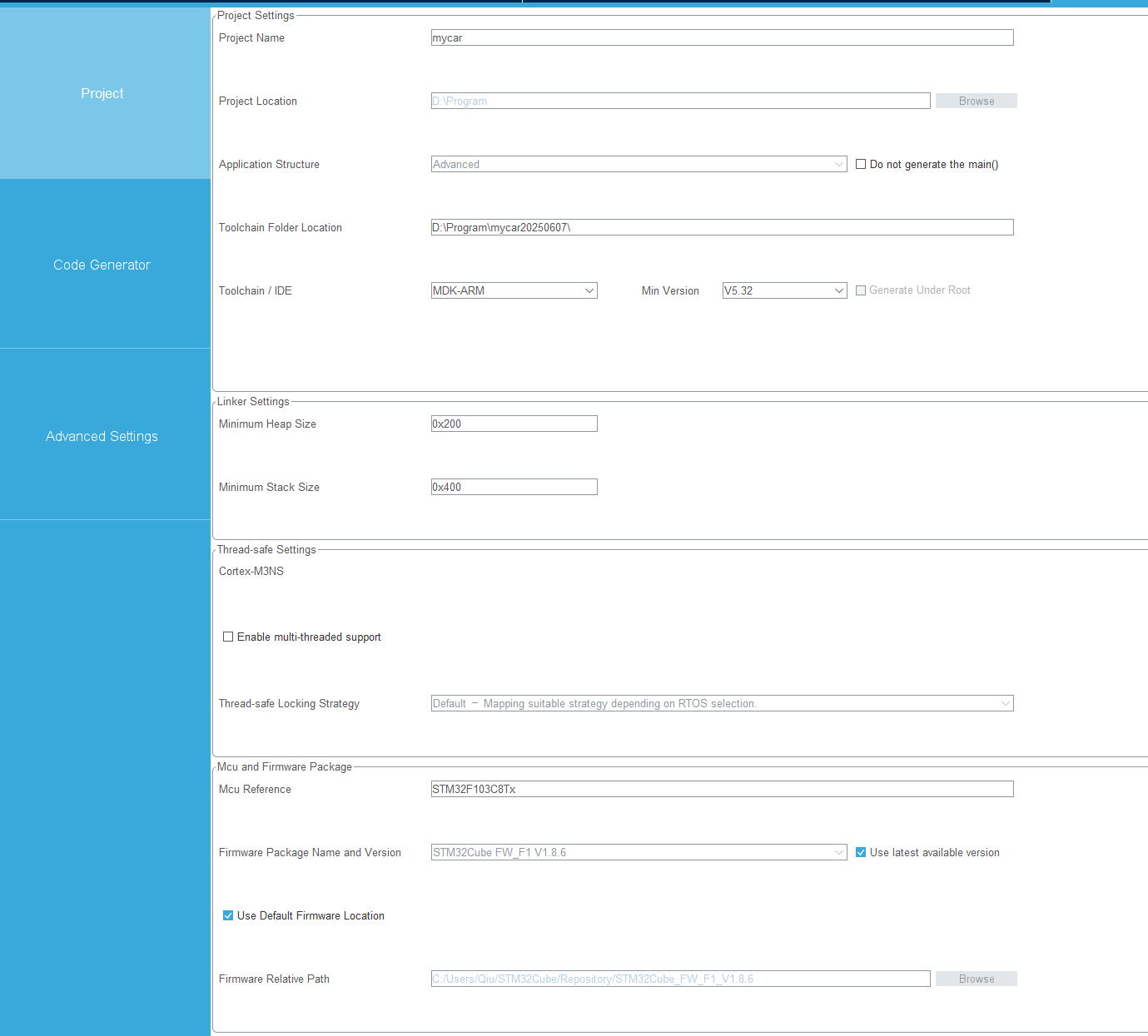
1.程序生成
接上一篇,配置完成后,生成KEIL程序。
2.初始化
(1)MPU6050初始化
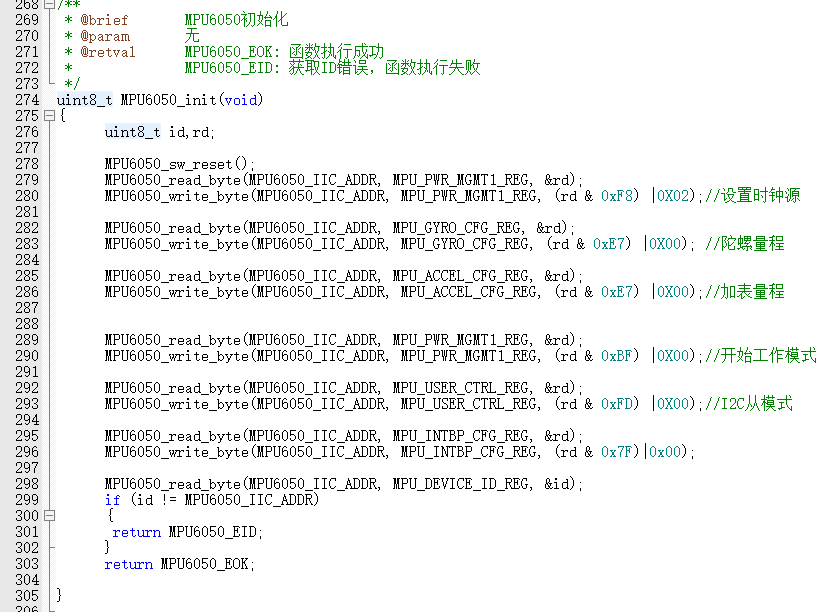
需要设置时钟源,量程,然后使能6050,量程可以自己调整,是不是最大量程没有关系,具体寄存器的值可以对照6050的手册,只要使用I2C读写函数往对应地址写入数据即可。
关于i2c这块,不清楚是否是103的i2c有问题还是怎么了,下几次程序后,有可能出现初始化不成功的状态,必须断电重启,这个问题我就没有深究了。
(2)初始化DMP
DMP是6050内置的计算程序,可以帮你计算出姿态角。如果对于导航方面有兴趣,可以直接采集加速度和角速度,可以有三种处理:
a.直接计算俯仰角:利用加速度与俯仰角的关系,求个atan2,但注意单位是弧度,这种算法会有一定噪声,不过应该不影响控制
b.互补滤波:在a的基础上加上对陀螺数据的应用,俯仰角的变化速率是Gx,那么k时刻的俯仰角可以认为是k-1时刻的俯仰角加上Gx*T,但是陀螺也有缺陷,它的数据长期会漂移,就是它数据有零偏,这个零偏是随机游走的,而且积分后,这个零偏不像白噪声可以变成0,它会一直增大,所以不能完全使用陀螺数据。因此,把陀螺算出来的俯仰角和加表算出来的俯仰角做组合,就相当于各信一点。
c.卡尔曼滤波:这是从互补滤波的进一步,两个信息来源要组合,到底该多少系数合适,卡尔曼就是解决了这个问题,按照信息的方差的反比来设计比例,方差小的系数大,但是方差的多少是要由你来设定的,Q和R矩阵的大小。所以其实不是一个容易的设定,而且计算也麻烦些,要求矩阵的逆,也要保证P阵是正定的,在这里看不出太大效果,建议仿真的时候可以去学习。关于卡尔曼的理解,可以看我之前的文章,从最小二乘去理解。
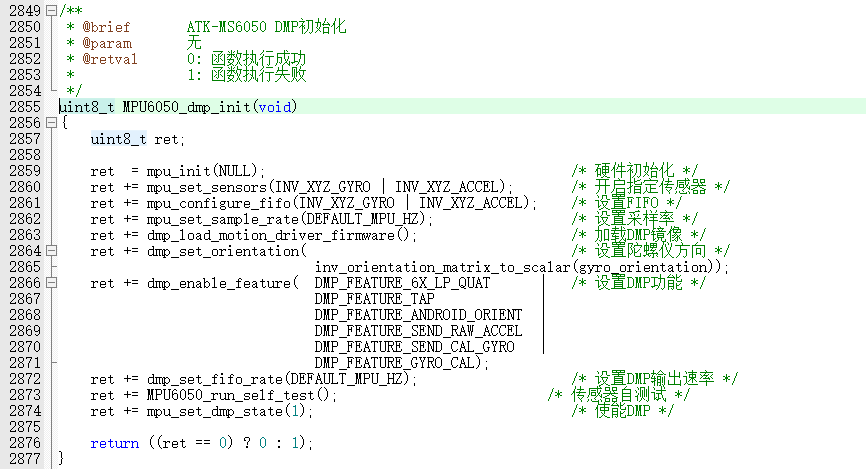
这里我使用DMP直接解算俯仰角。
(3)其余功能的开启
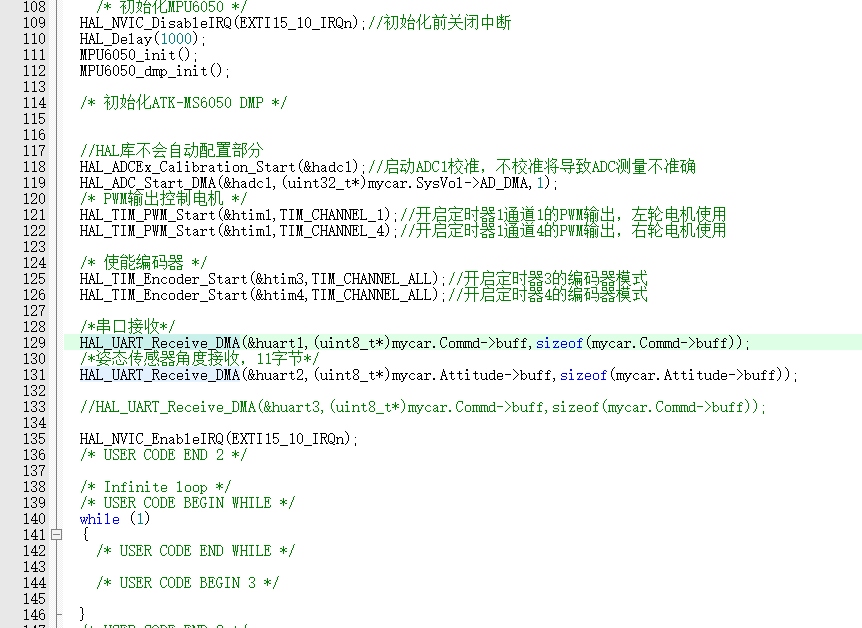
开启ADC校准以及采集,PWM输出,编码器使能,开启外部中断。这都是用HAL库函数一句实现,这就是使用HAL库的优势
(4)中断函数
本工程里,主函数没有任何功能,全在中断中实现,虽然F103计算能力差,但是中断时间5ms足够长,所以是足够使用。
中断是程序里最重要的部分。
a.读取姿态以及角速度
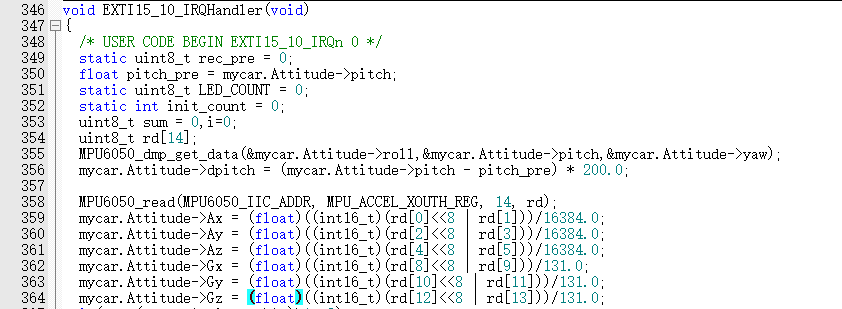
对于转向环,我这里没有做,所以也就没有使用航向角以及对应的角速度。
b.读取车轮转速

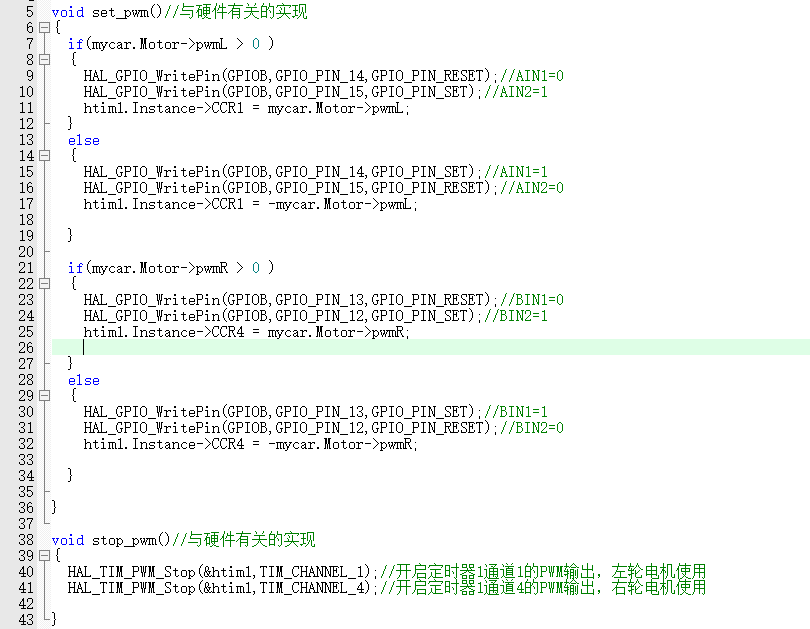
c.控制算法计算以及转化为对应PWM的占空比,控制算法在下一篇章节展开。
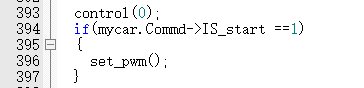
我这里使用了一个IS_start变量,也就是上电延时后一段时间才开始控制。因为我发现采集到的6050俯仰角收敛很慢,输出后还会变一个台阶,很影响控制,我不知道是这个芯片的原因还是因为啥,我折腾了很久只能延时,有了解的人告诉我下要怎么处理。
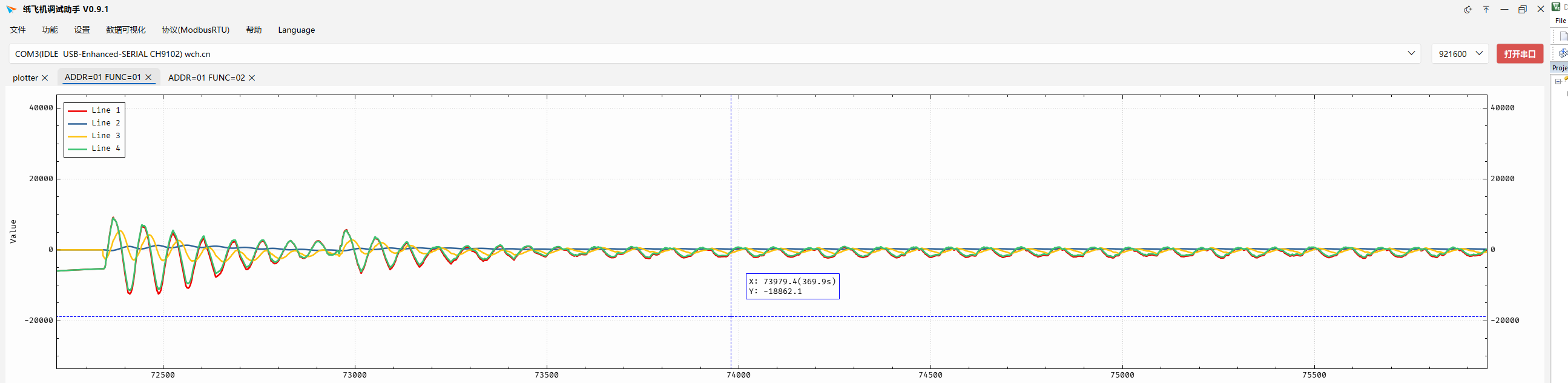
d.串口数据填充发送以及电压采集

数据填充的格式根据你用的上位机决定,有很多开源的画图上位机,比如VOFA,我用的是纸飞机。

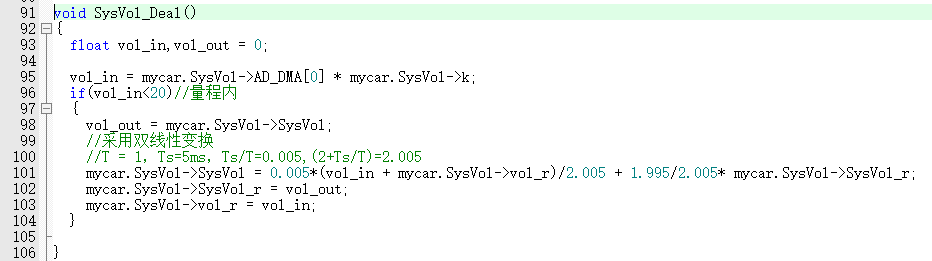
对于电压采集,我这里做了个滤波,一开始想做电压补偿,其实没啥必要,不过作为滤波器离散化的学习也可以。这里必须把计算放在中断保证时序,离散化的运算必须保证运算周期和离散周期一致,不然频率特性不一样。关于滤波器的学习心得,后续有机会再发个文章。
e.周期性点灯
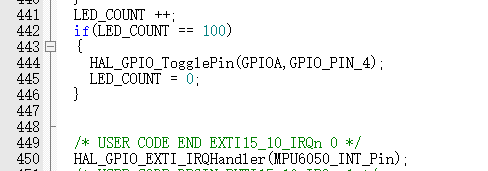
LED指示运行状态,这还是很有必要的。
综上,就是自平衡小车的程序部分了,所有无聊的部分都说完了,接下来就是控制部分。

















 917
917

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









