






总算是来到控制算法了,这是我买平衡车的本意,这一方面也正在继续学习中,能写到哪就写到哪吧,认识总算在更新,也希望和各位交流。
1.控制对象及模型
通过控制占空比,施加不同的等效电压在直流电机上,根据直流电机的电压电流关系,产生电流,电流产生转矩。
假定无打滑情况,转矩产生前向加速度,也产生使小车摆动的角加速度,这之间是复杂的耦合关系,可以通过受力分析或拉格朗日方程分析。具体分析我就直接贴图了。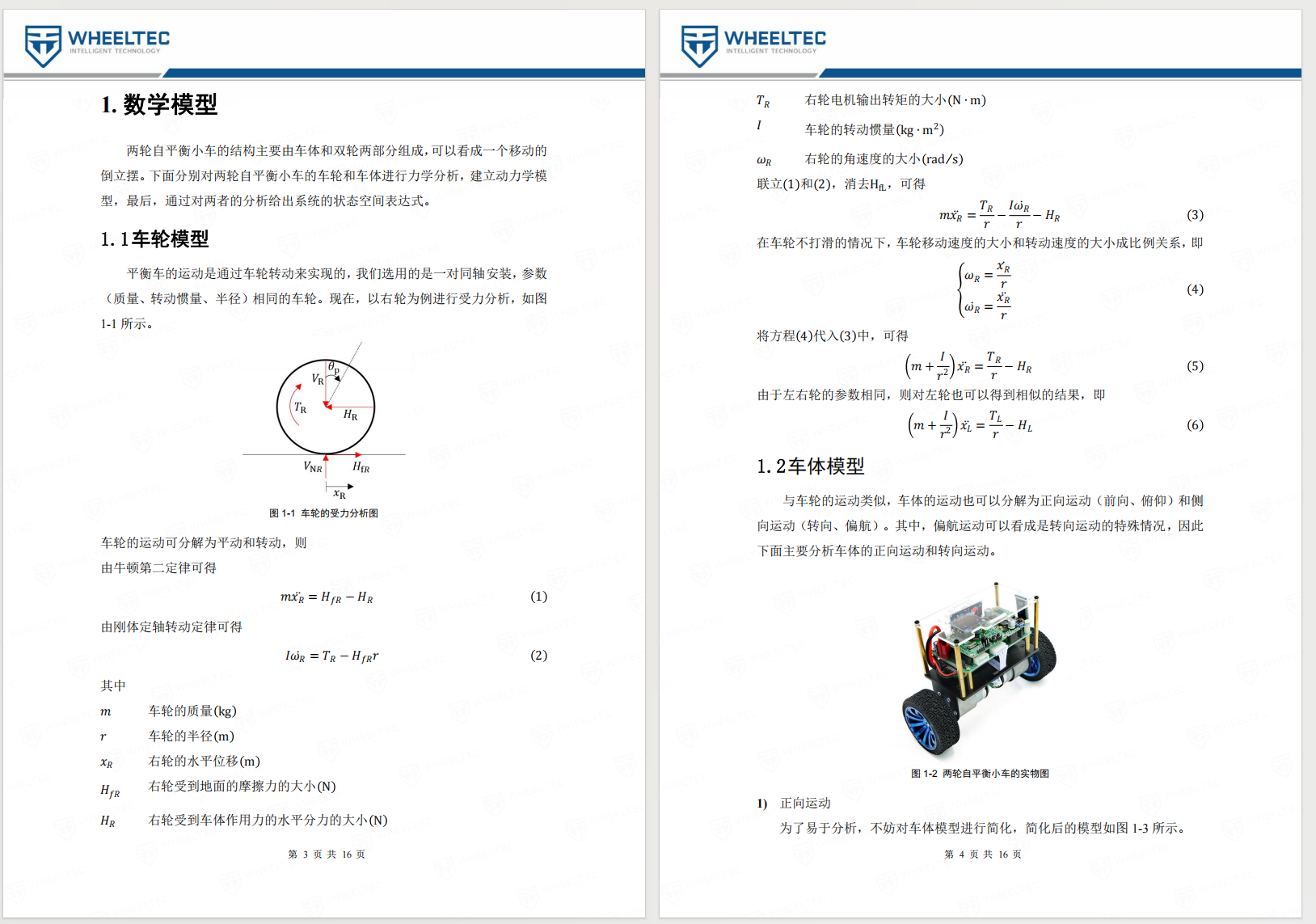
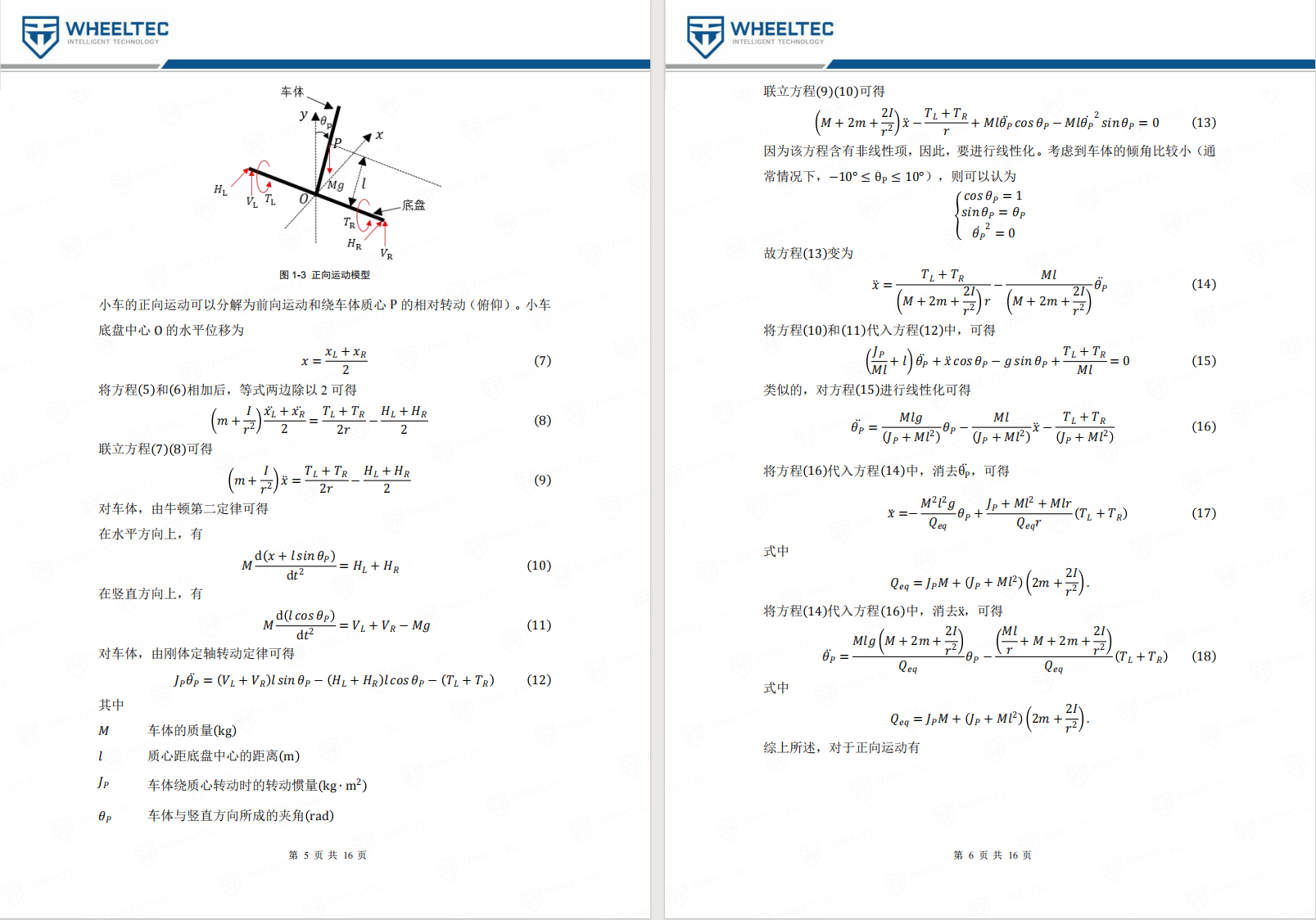
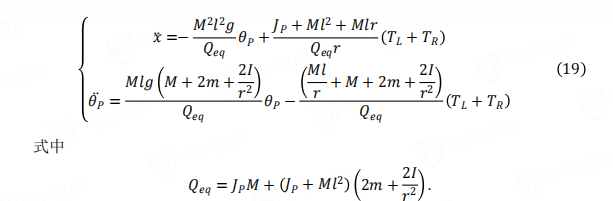
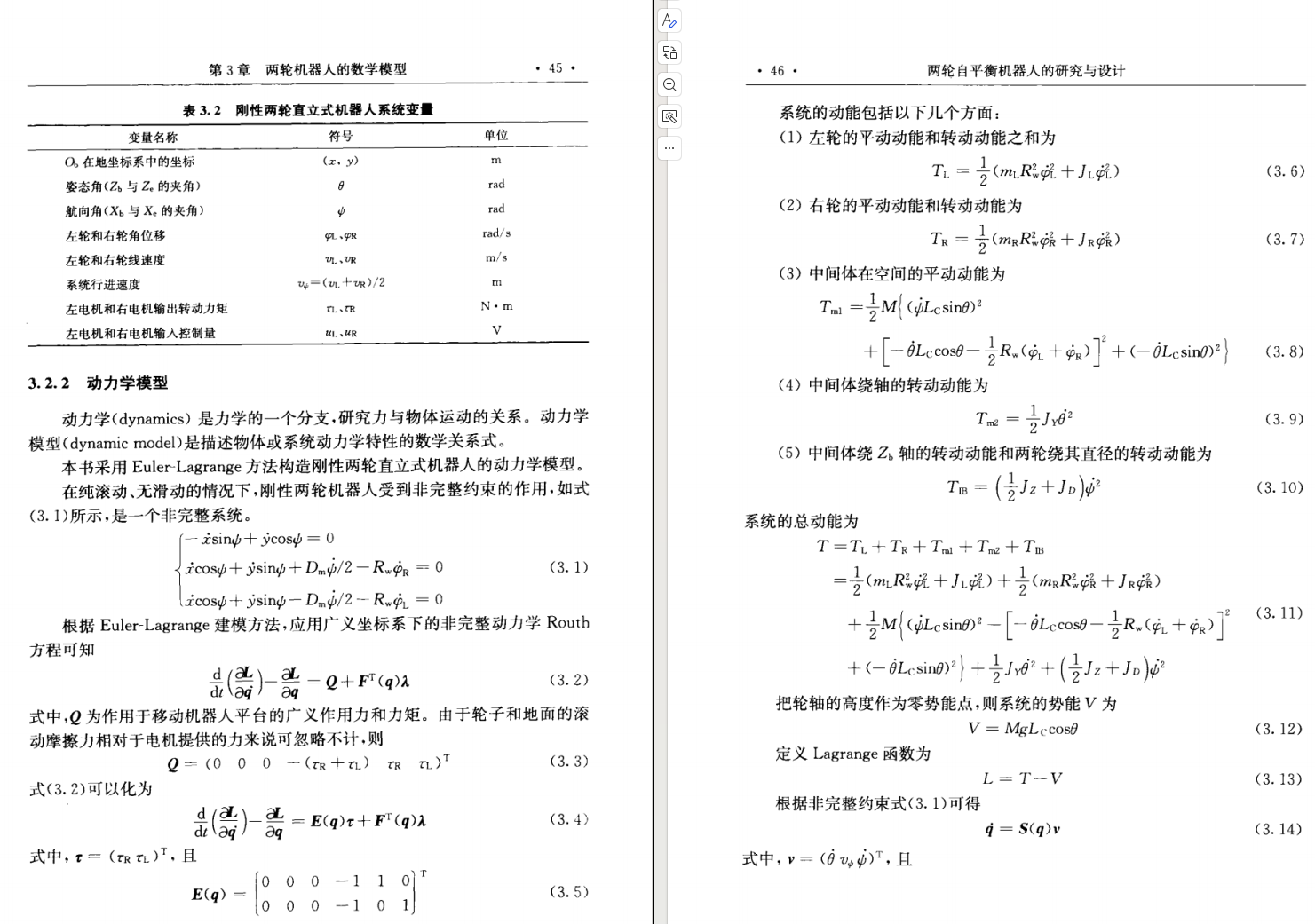
用拉格朗日方程分析
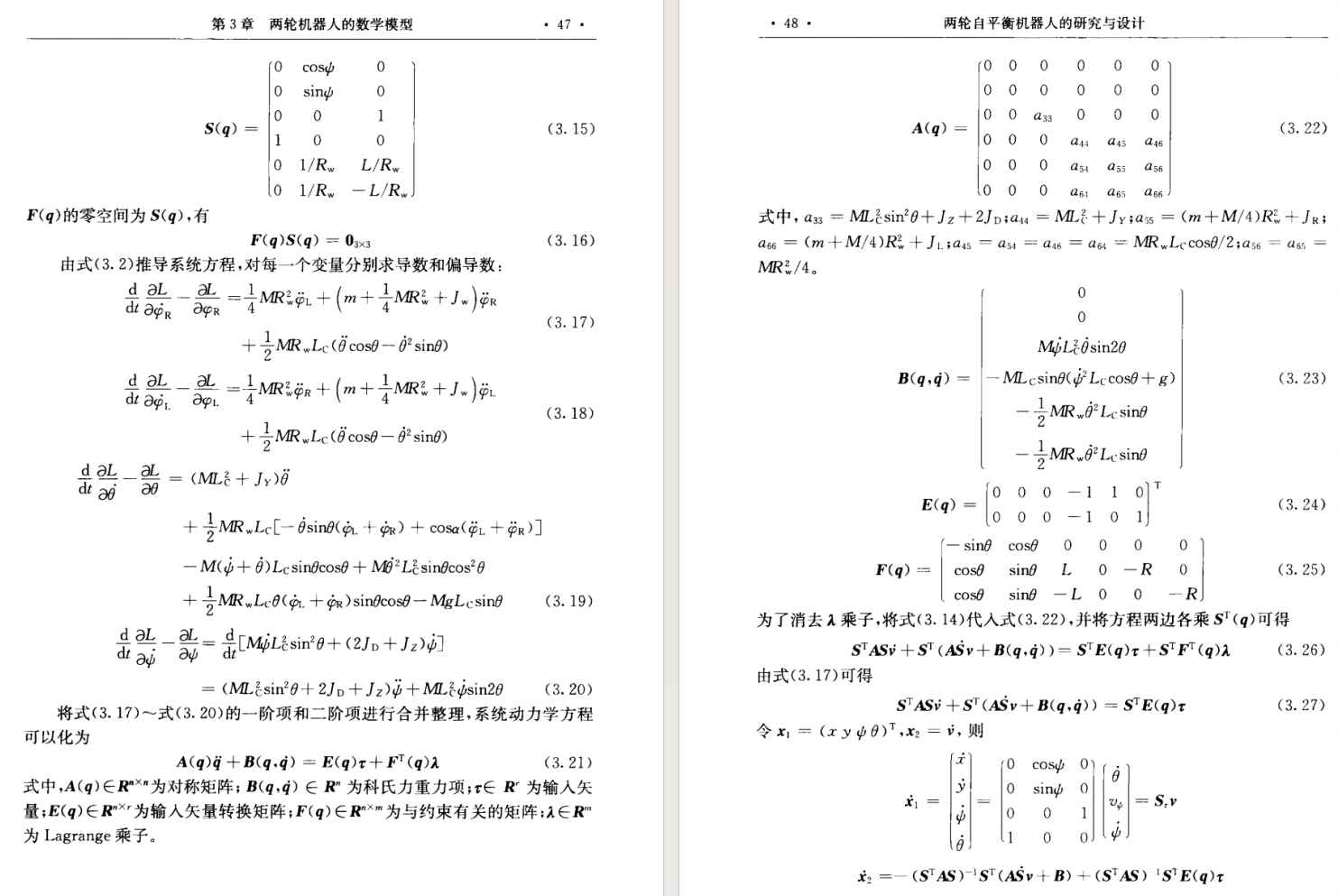
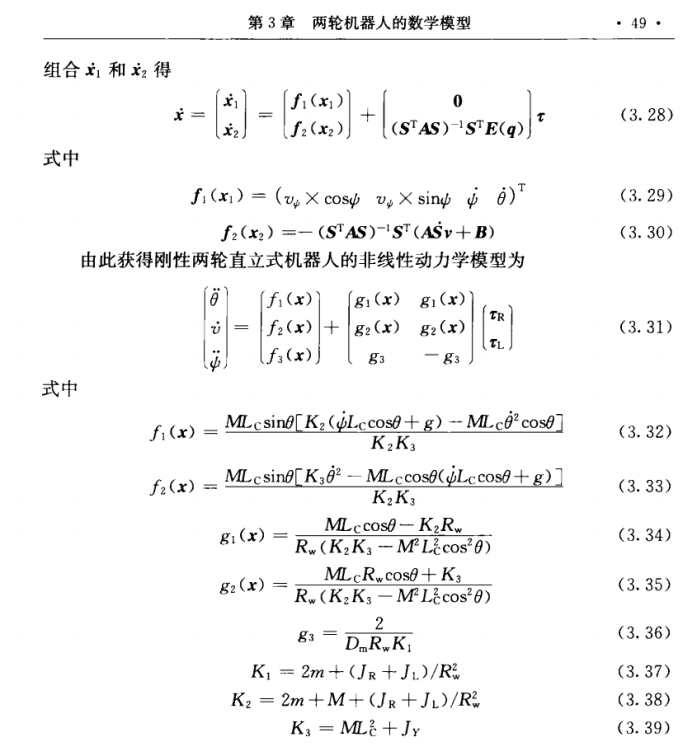
从结果来看,俯仰角和位移都是非线性的,而且位移x和俯仰角还有耦合,更糟糕的是我们不知道各个参数,所以,使用PID是简单而有效的,实践对比后也确实如此。
2.控制律:
姿态环:

姿态环只有PD,控制律中其实使用PD是最好的,因为不会导致系统升阶,但是D通常会有问题,因为如果通过俯仰角做差分,会把噪声放大,加滤波又带来延时,好在我们有陀螺仪。我经过测试,发现用陀螺仪的角速度比差分效果好,当然没有陀螺仪的话,用一些非线性的微分器也是可以做的。在这里要注意各个的极性,极性是非常重要,极性正确的话,调参是很快的。
速度环:

速度环是常规的PI,为什么上门用D,这里不用呢?我觉得如果用的也不一定不行,我后续有机会再试试。但是站在现代控制的角度,就能理解为什么是这么设计:
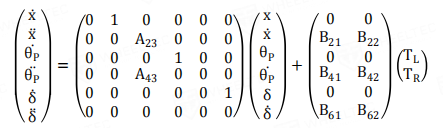
线性化后的状态方程可以这么写,如果不看转向环,即最后两个变量,那么这个状态方程的控制率设计为全状态反馈,通过配置好系数K,使得A-BKI的行列式全为负实数根,那么就收敛,这其实就是LQR是基础。那么可以看到,只要控制率是状态变量的线性组合,就能控制的住,对应这两个回路,就是PD和PI。
除此之外,有个反直觉的事,速度环是正反馈,而不是负反馈,这也是由于单输入多输出系统的影响,速度的方程中,通过姿态产生抑制项,从而保证稳定。
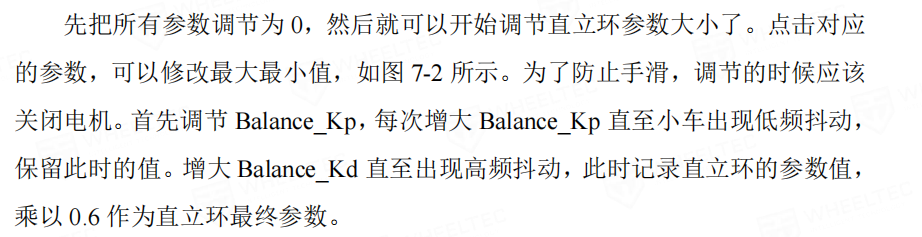
3.调节方法:
直接贴图了,重点就是,极性很重要。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









