




 本文介绍了一种将ROS与Scratch相结合的方法,使小学生甚至幼儿园孩子也能接触和使用ROS,进行机器人图形化编程学习。通过四步快速开始指南,包括安装ROS和依赖项、打开特定网址、运行rosbridge_server及在Scratch中添加ROS扩展,即可实现ROS与Scratch的链接。文章还提供了几个案例,如chatter字符串、actionlibfibonacci、turtlesim等,帮助初学者快速上手。
本文介绍了一种将ROS与Scratch相结合的方法,使小学生甚至幼儿园孩子也能接触和使用ROS,进行机器人图形化编程学习。通过四步快速开始指南,包括安装ROS和依赖项、打开特定网址、运行rosbridge_server及在Scratch中添加ROS扩展,即可实现ROS与Scratch的链接。文章还提供了几个案例,如chatter字符串、actionlibfibonacci、turtlesim等,帮助初学者快速上手。
这是之前,“使用Scratch2和ROS进行机器人图形化编程学习”的升级版。
为了让更多小朋友,尤其是小学以及幼儿园的孩子,可以接触和使用ROS,无缝对接scratch编程/AI/ROS。
重要参考链接:
- https://github.com/Affonso-Gui/scratch3-ros
- https://github.com/Affonso-Gui/scratch3-ros-vm
- https://github.com/LLK/scratch-vm
只需四步,即可使用(快速开始指南):
- 安装ROS和依赖:
# Install main dependencies sudo apt install ros-kinetic-rosbridge-server # Install examples dependencies sudo apt install ros-kinetic-turtlesim ros-kinetic-actionlib-tutorials
- 打开:http://scratch3-ros.jsk.imi.i.u-tokyo.ac.jp
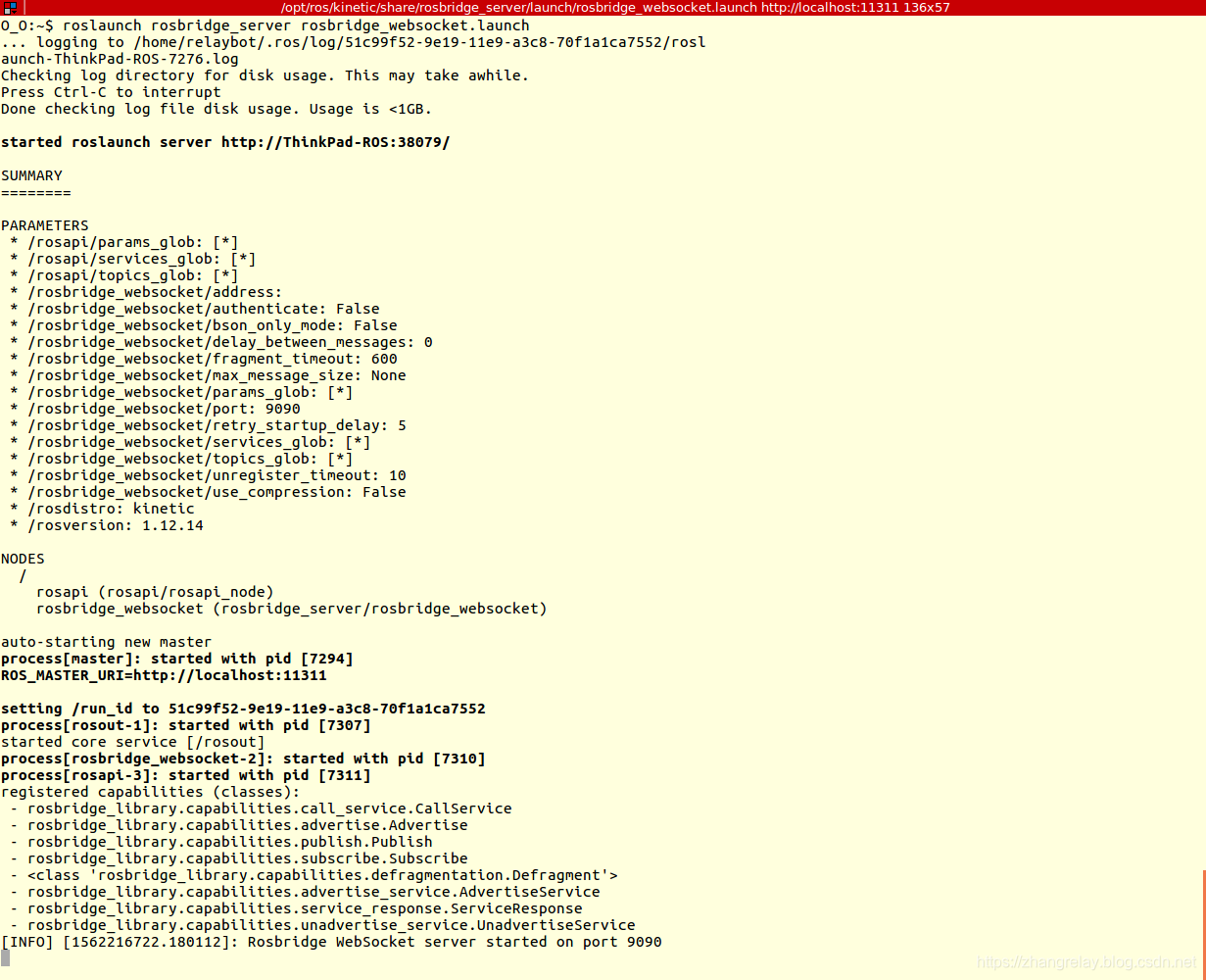
- 新开终端输入如下命令:
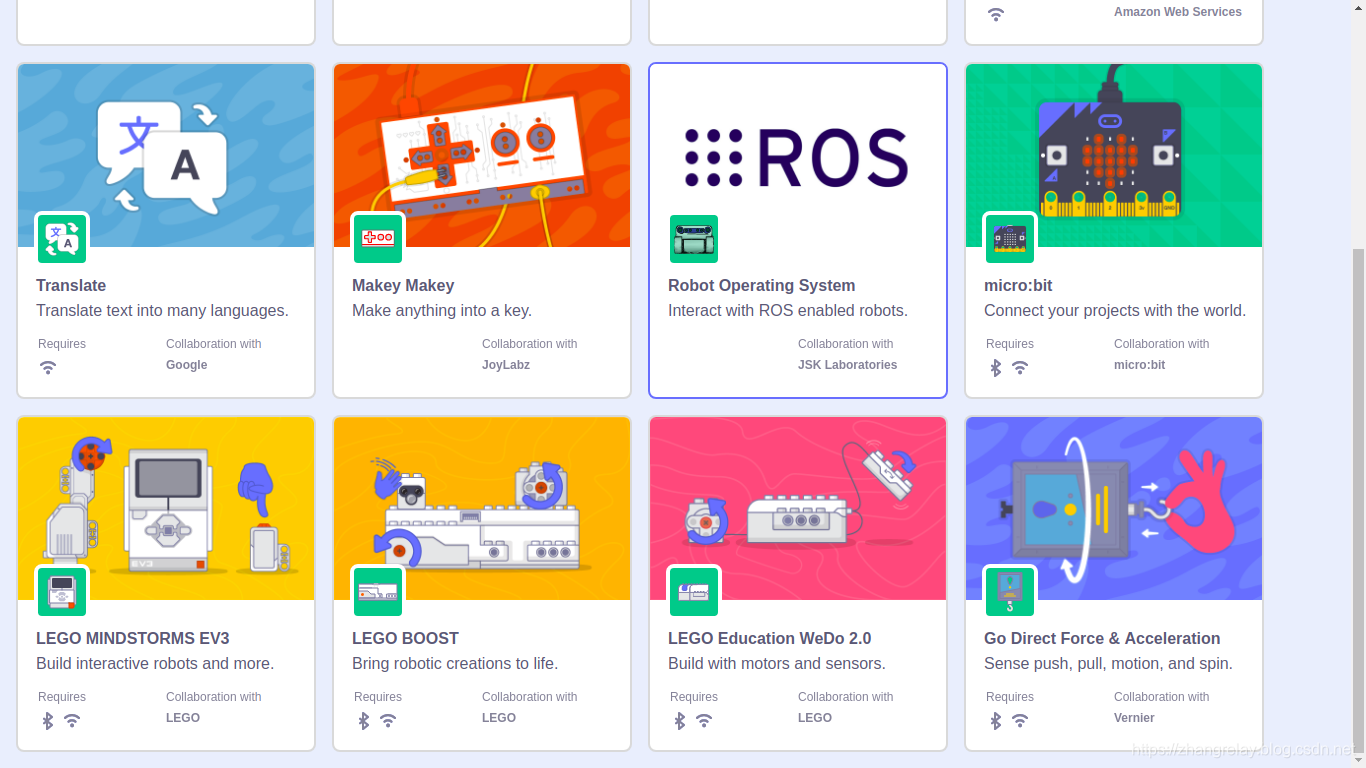
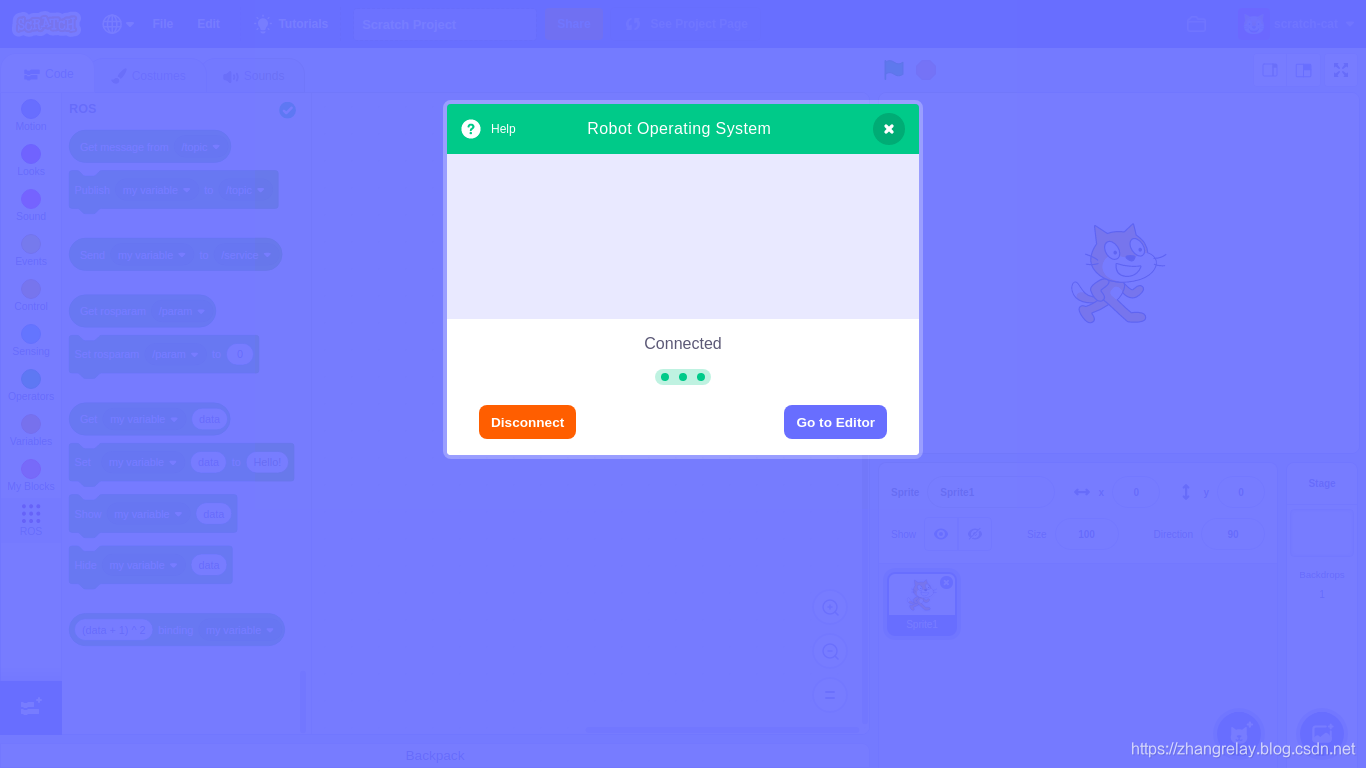
roslaunch rosbridge_server rosbridge_websocket.launch - 在左下角添加扩展中选择ROS Extension,并输入localhost的IP。(127.0.0.1或192.168.x.x)。
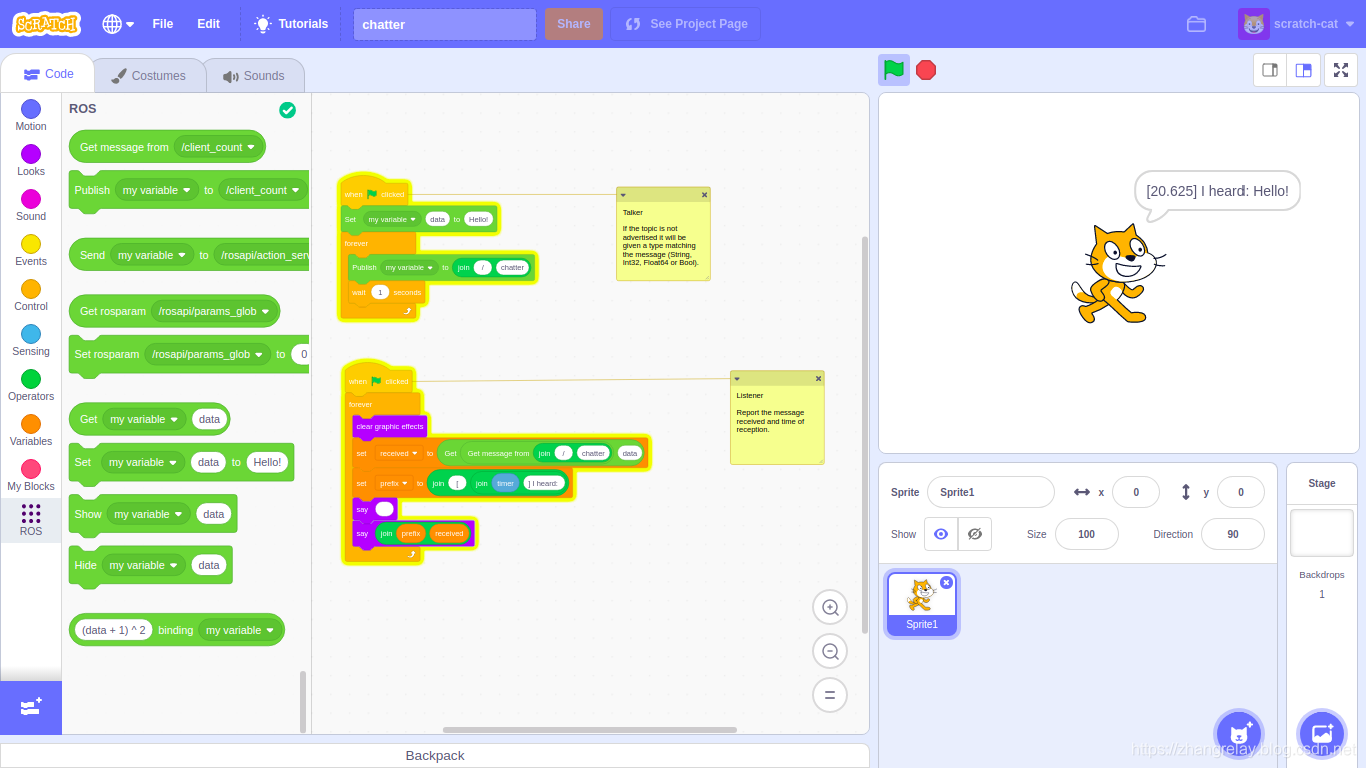
先看3个简单案例:
1. chatter 字符串
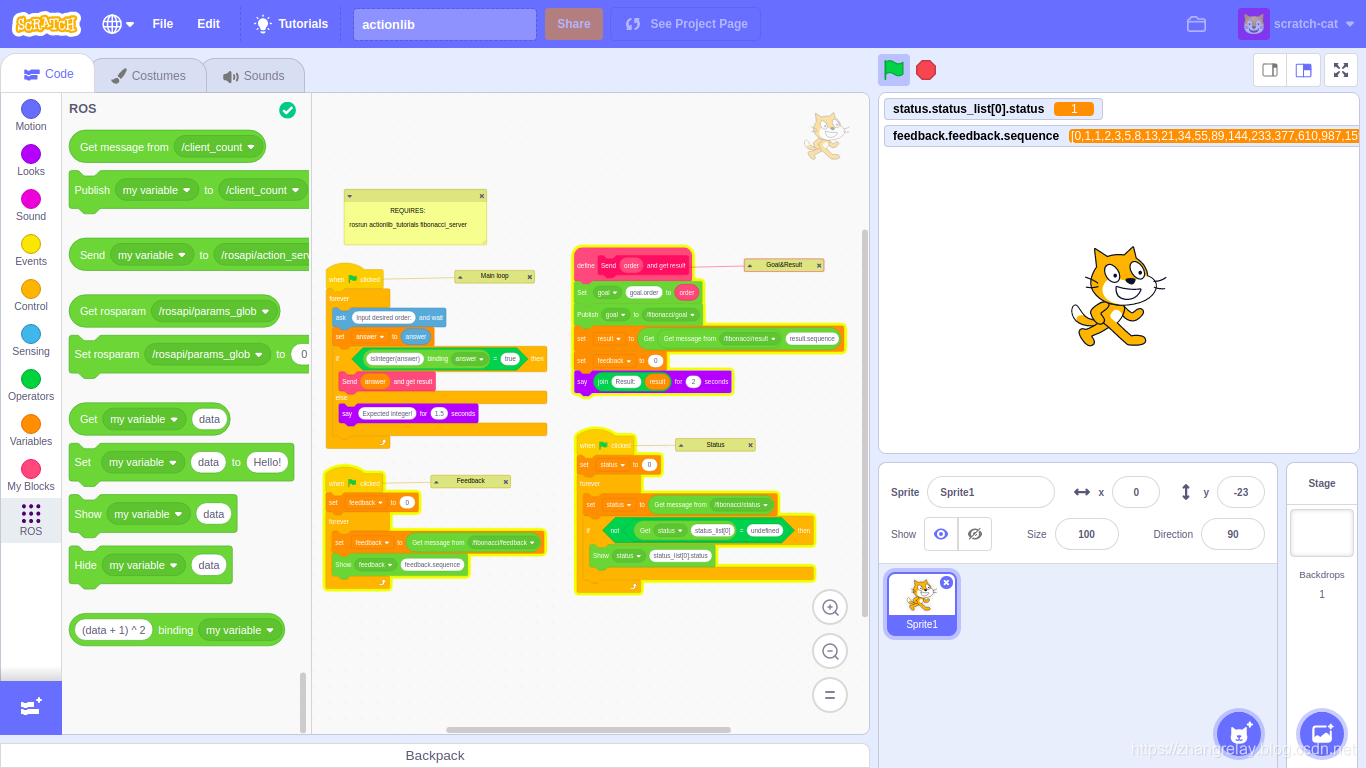
2. actionlib fibonacci
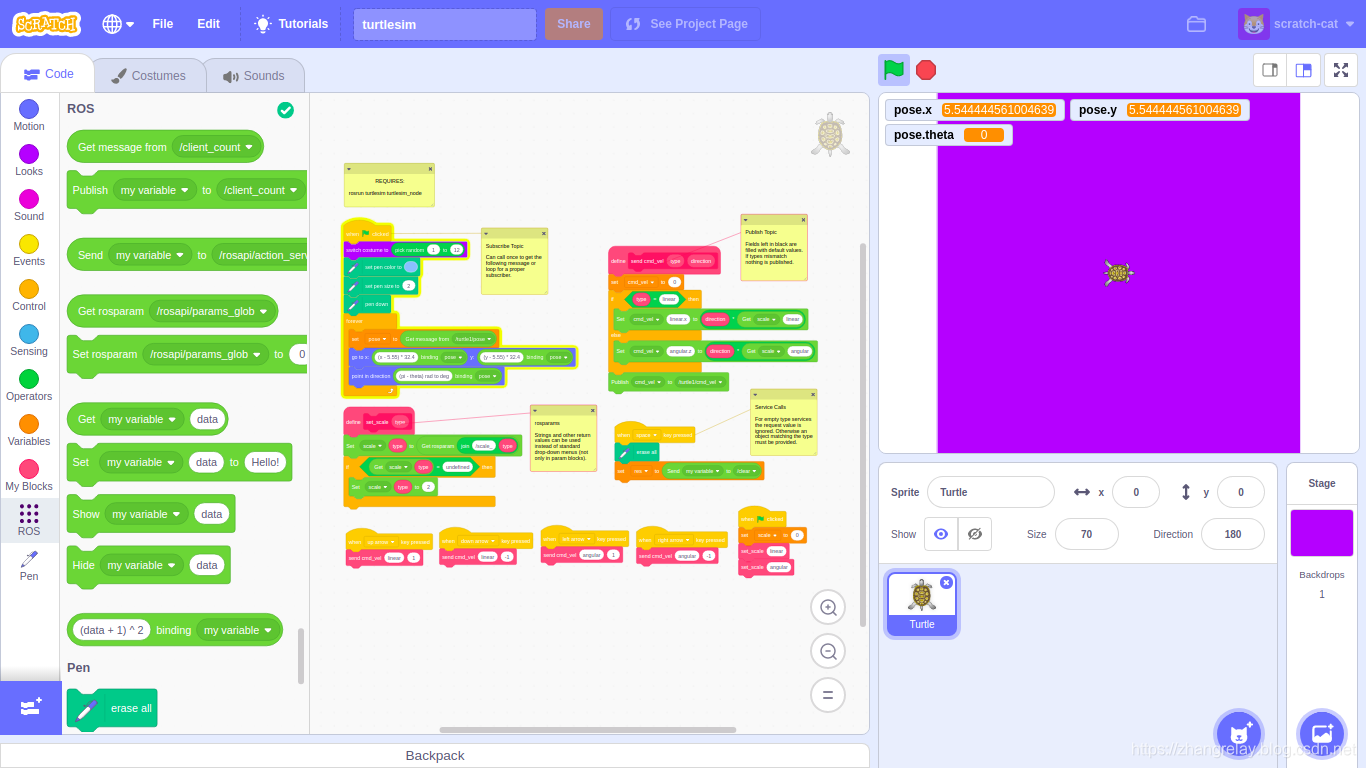
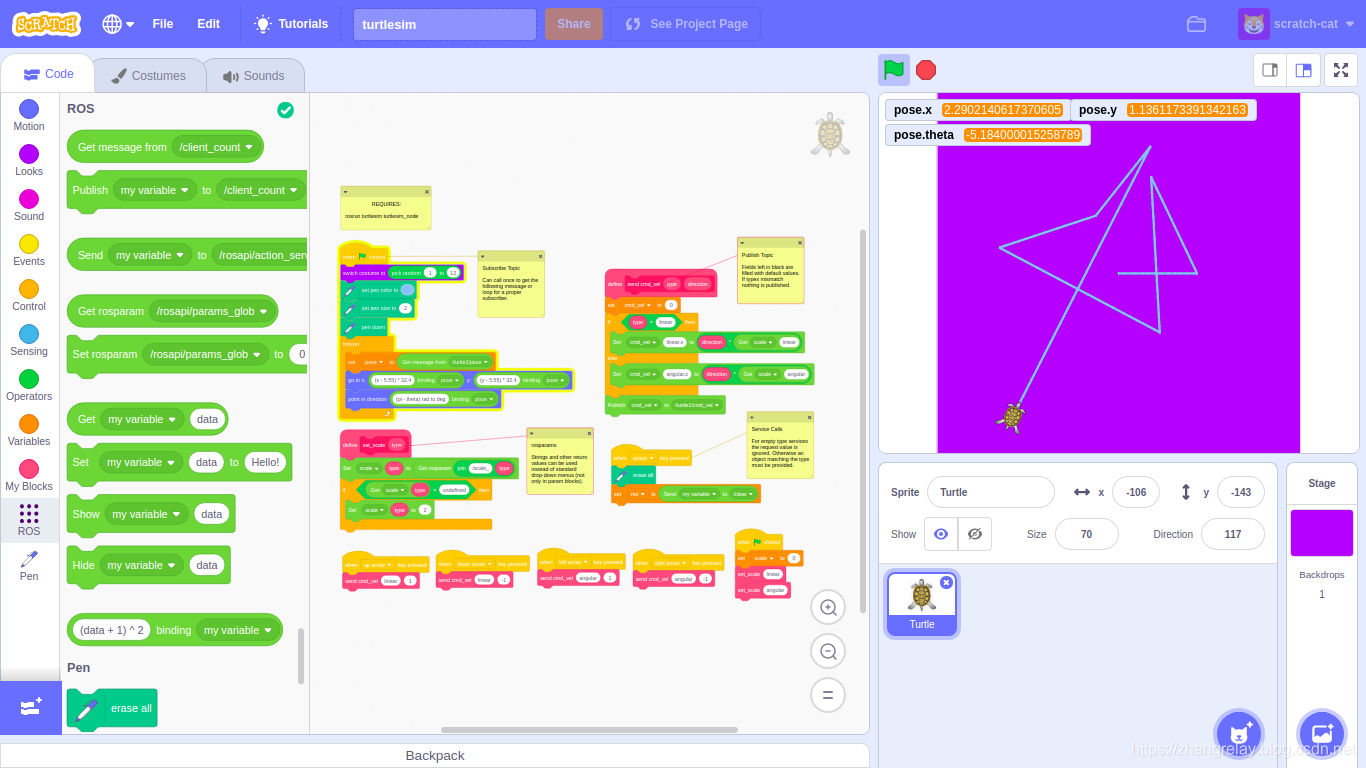
3. turtlesim
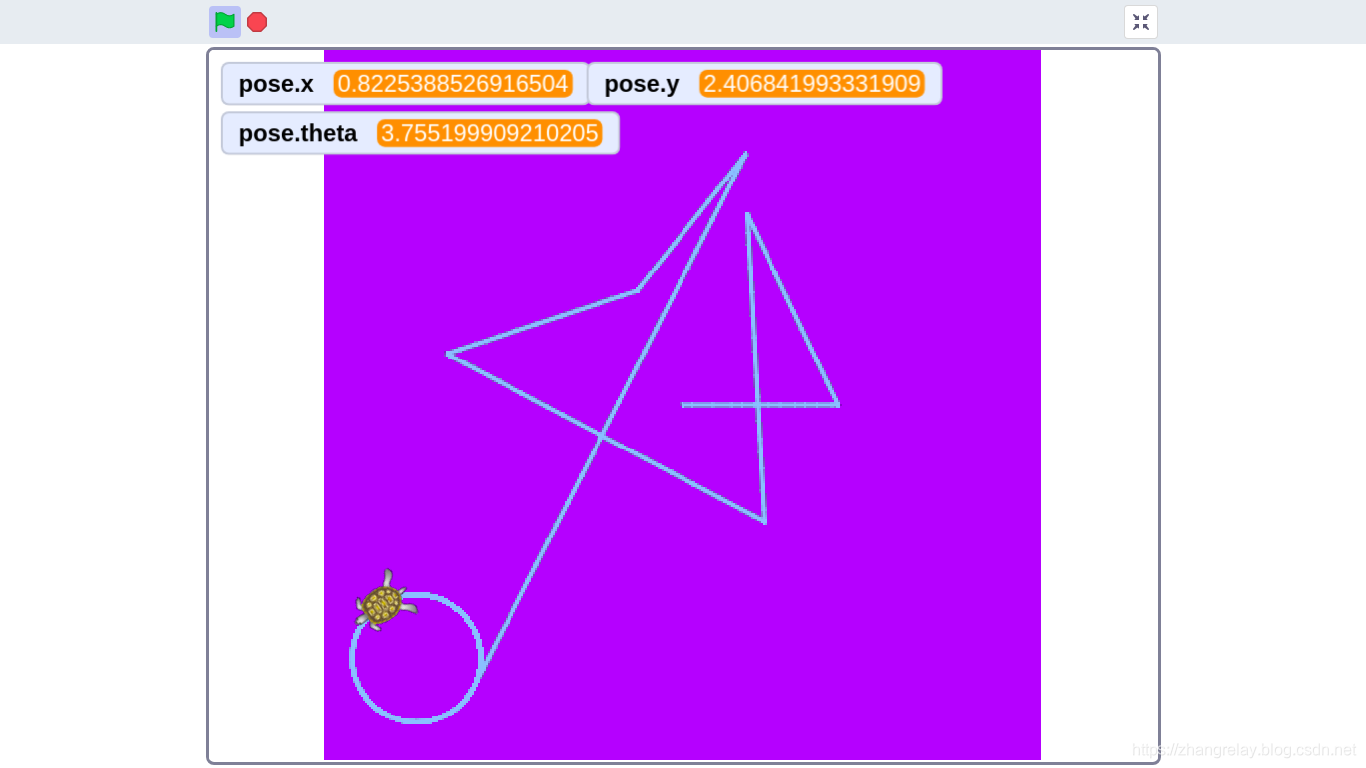
用键盘遥控看看效果???
使用命令也是可以的:
rostopic pub -r 10 /turtle1/cmd_vel geometry_msgs/Twist "linear:
x: 0.1
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.1"
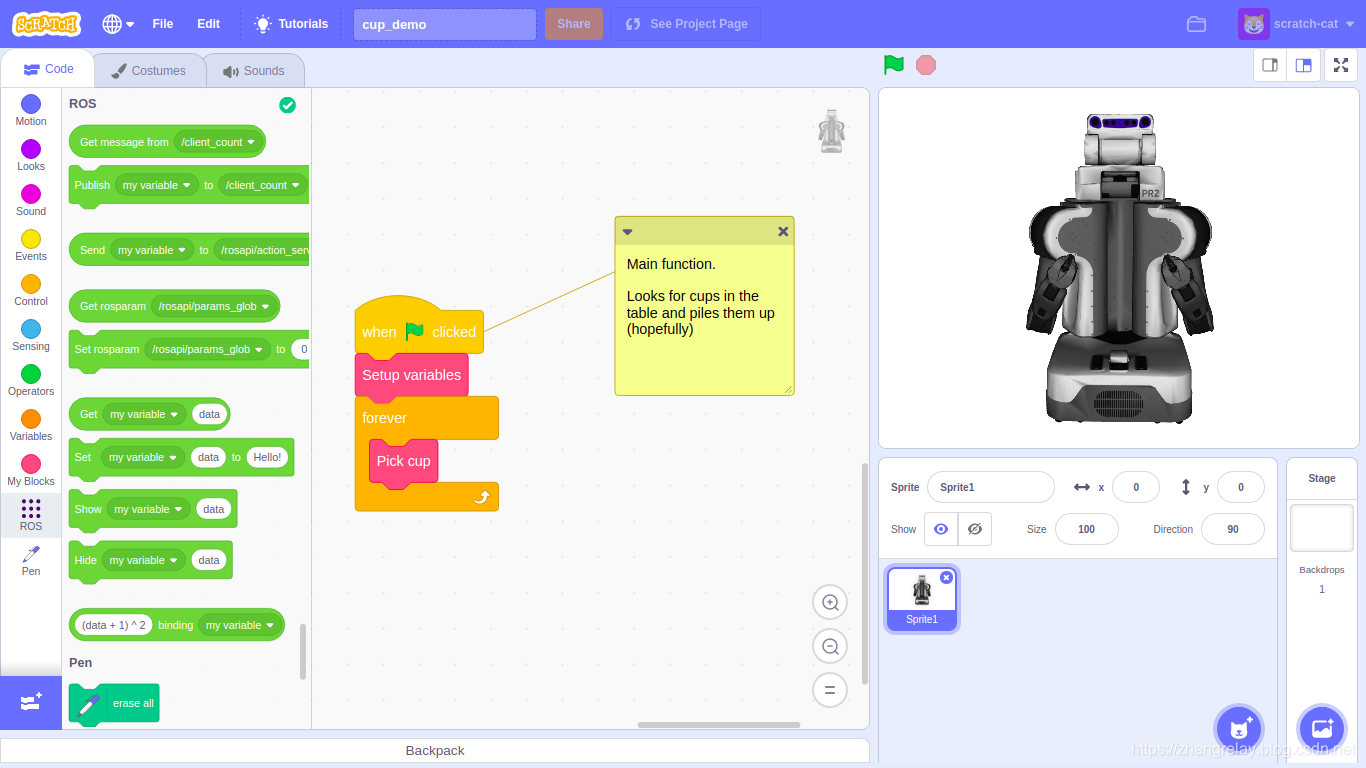
4. pr2
当然案例还有很多。
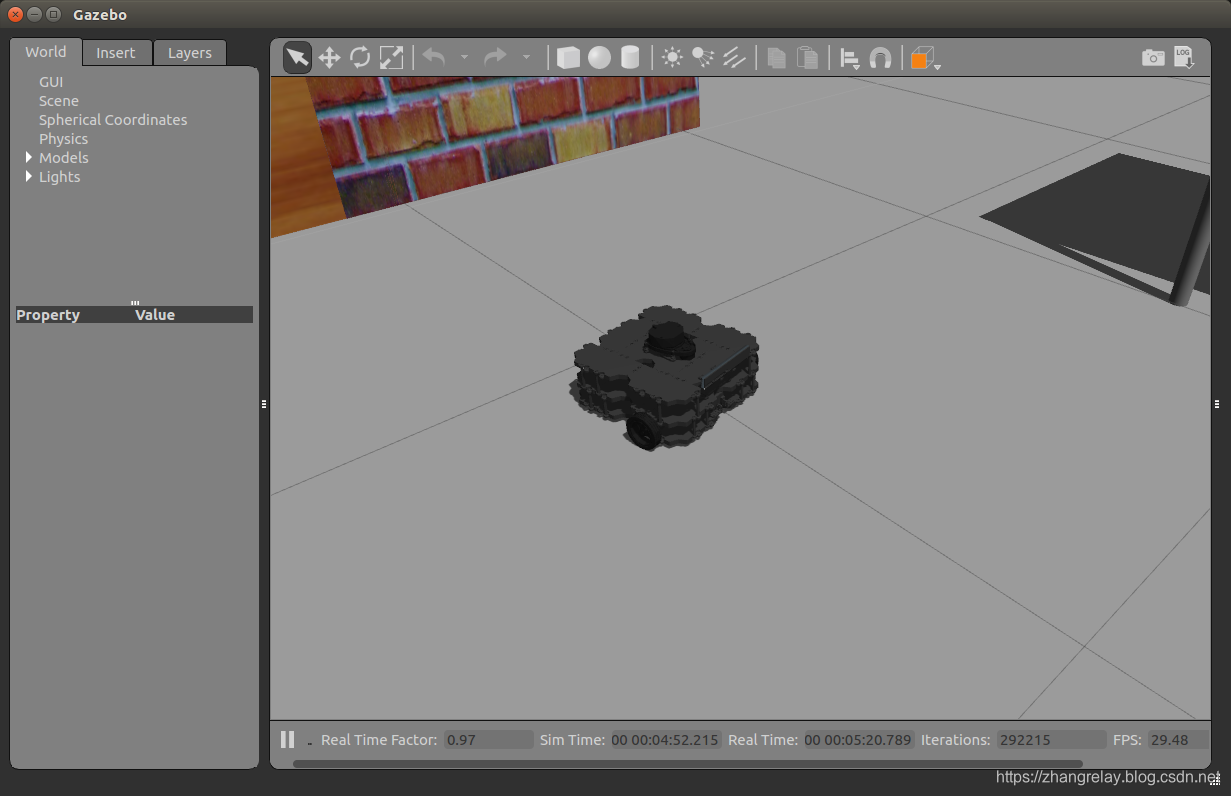
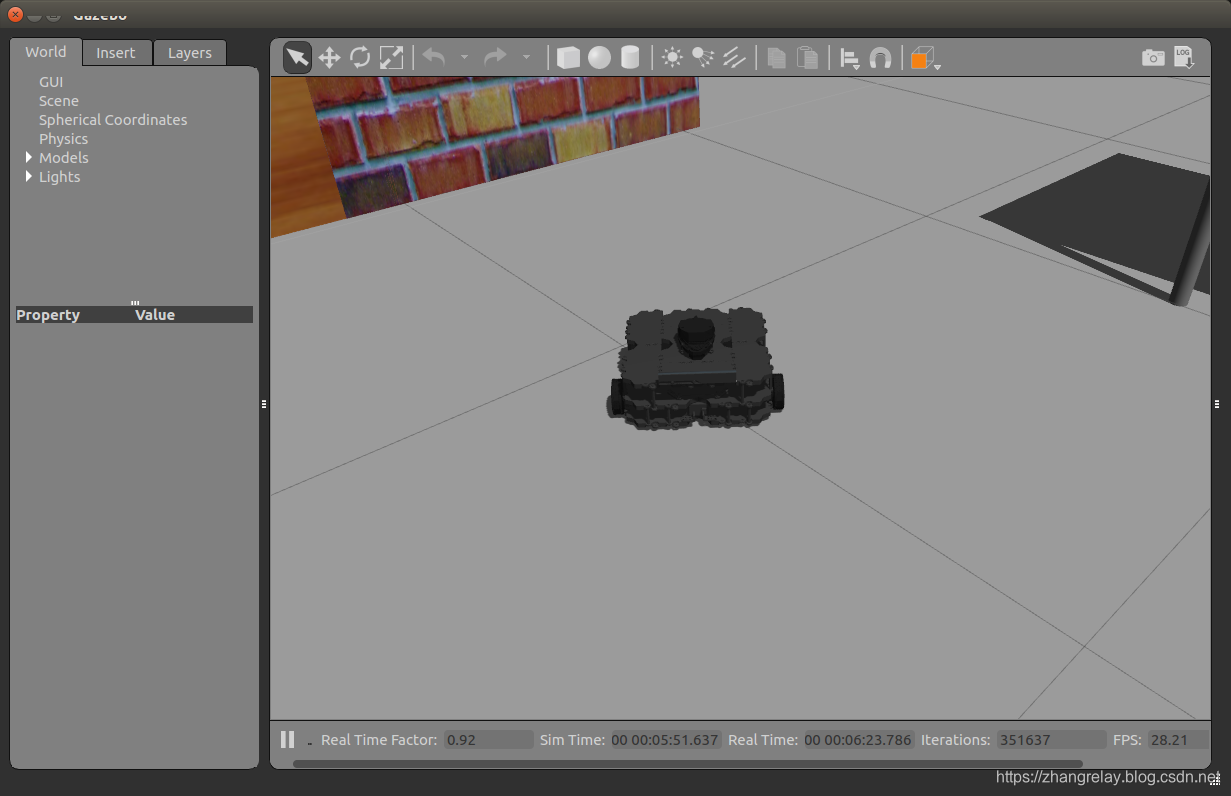
自己尝试制作一个案例吧。如使用键盘遥控机器人在环境中运动如何实现呢?


















 1万+
1万+






 到【灌水乐园】发言
到【灌水乐园】发言









