



 本文详细介绍了在ROS(Robot Operating System)中如何使用YAML格式来定义几何消息如PointStamped和Vector3,包括不同形式的发布示例,并展示了如何为常用案例编写和使用YAML配置。
本文详细介绍了在ROS(Robot Operating System)中如何使用YAML格式来定义几何消息如PointStamped和Vector3,包括不同形式的发布示例,并展示了如何为常用案例编写和使用YAML配置。
参考链接:
- roboticsbackend.com/ros-param-yaml-format
- roboticsbackend.com/ros2-yaml-params
- wiki.ros.org/ROS/YAMLCommandLine
- yaml.org
- yaml.org/spec/1.2.2
此处以ROS1为例:
Header header uint32 seq time stamp string frame_id Point point float64 x float64 y float64 z
如下4中等效:
rostopic pub pt geometry_msgs/PointStamped '{stamp: now, frame_id: base_link}' '[1.0, 2.0, 3.0]'
rostopic pub pt geometry_msgs/PointStamped '[0, now, base_link]' '[1.0, 2.0, 3.0]'
rostopic pub pt geometry_msgs/PointStamped '{header: {stamp: now, frame_id: base_link}, point: [1.0, 2.0, 3.0]}'
rostopic pub pt geometry_msgs/PointStamped '{header: {stamp: now, frame_id: base_link}, point: {x: 1.0, y: 2.0, z: 3.0}}'
比如常用案例:
geometry_msgs/Vector3 linear
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular
float64 x
float64 y
float64 z
写成yaml:
linear: {
x: 0.2,
y: 0,
z: 0
}
angular: {
x: 0,
y: 0,
z: 0.2
}
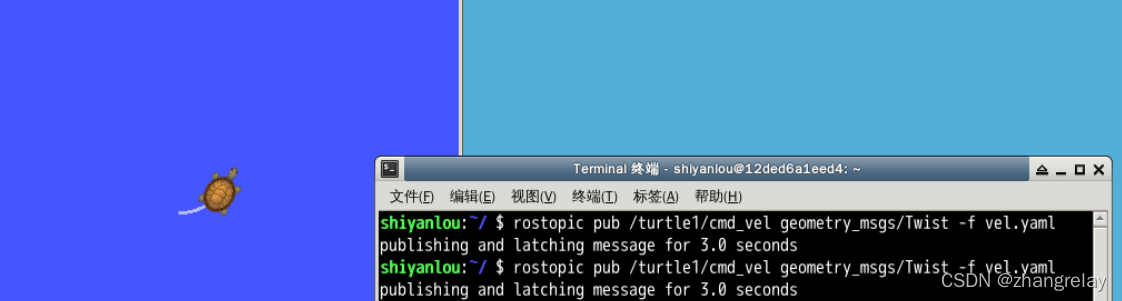
使用:
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist -f vel.yaml


















 1096
1096

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











