



 本文通过实例对比分析发现,ROS2相比于ROS1在实现相同功能时,消耗的系统资源显著增加,导致电量消耗增大,进而影响机器人的续航时间。即使是最简单的turtlesim示例,ROS2的CPU占用率也远高于ROS1。作者提供了详细的CPU使用情况截图以佐证这一结论,并建议根据具体需求选择ROS1或ROS2。
本文通过实例对比分析发现,ROS2相比于ROS1在实现相同功能时,消耗的系统资源显著增加,导致电量消耗增大,进而影响机器人的续航时间。即使是最简单的turtlesim示例,ROS2的CPU占用率也远高于ROS1。作者提供了详细的CPU使用情况截图以佐证这一结论,并建议根据具体需求选择ROS1或ROS2。
结论:同样功能实现ROS2Foxy比ROS1Noetic需消耗资源大的多得多!!!
通俗讲:
ROS2比ROS1耗电!
ROS2比ROS1耗电!
ROS2比ROS1耗电!
更直白一些:
ROS2机器人使用相同电池比ROS1续航短!
ROS2机器人使用相同电池比ROS1续航短!
ROS2机器人使用相同电池比ROS1续航短!
以最最最简单turtlesim为例,避免太多复杂测试,方便一眼看穿,这里用系统监视器。
ros1+turtlesim+键盘遥控:
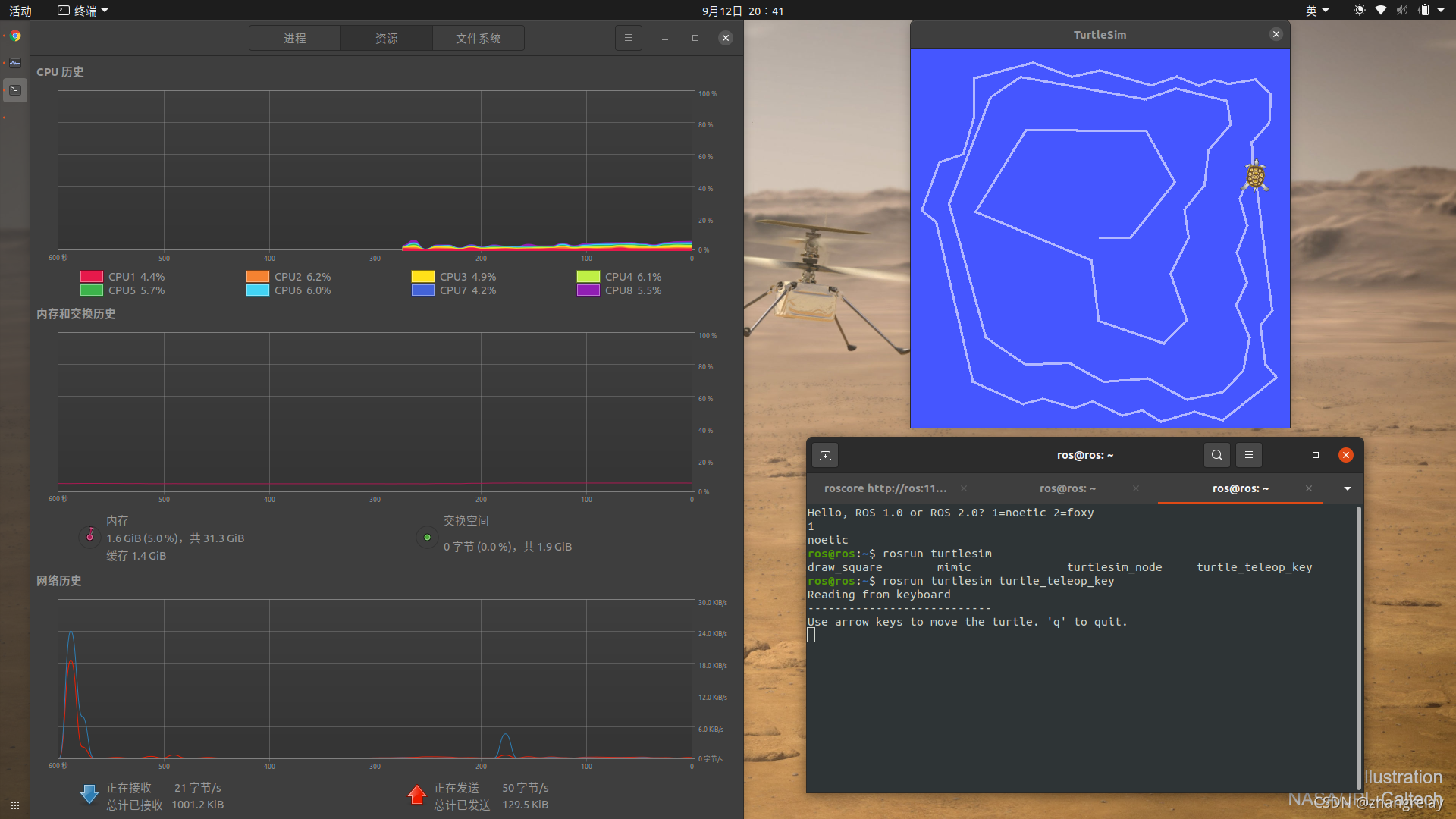
操作时间200s左右,注意上图历史0-300区间对应CPU等。
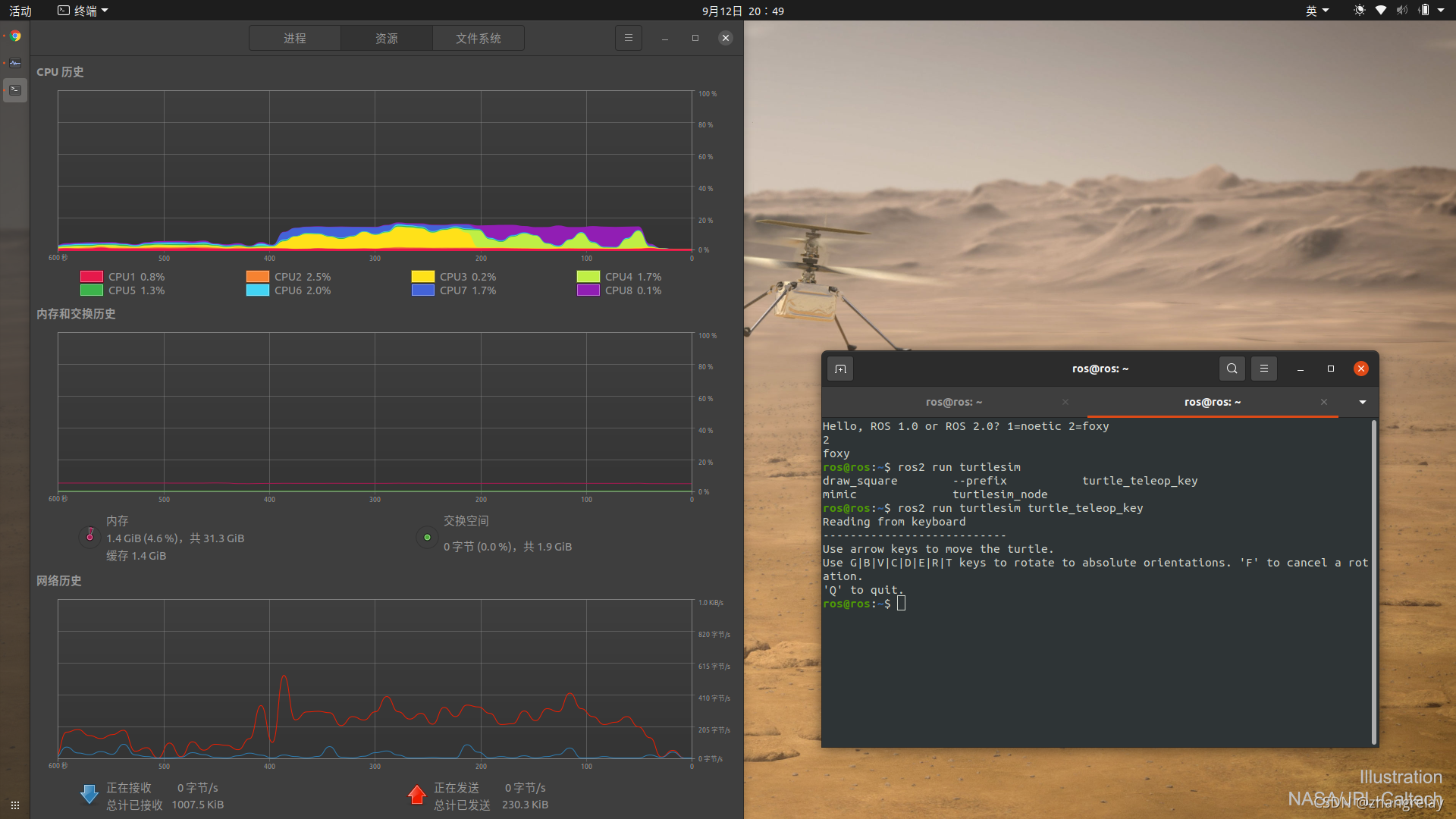
ros2+turtlesim+键盘遥控(暴击!!!):
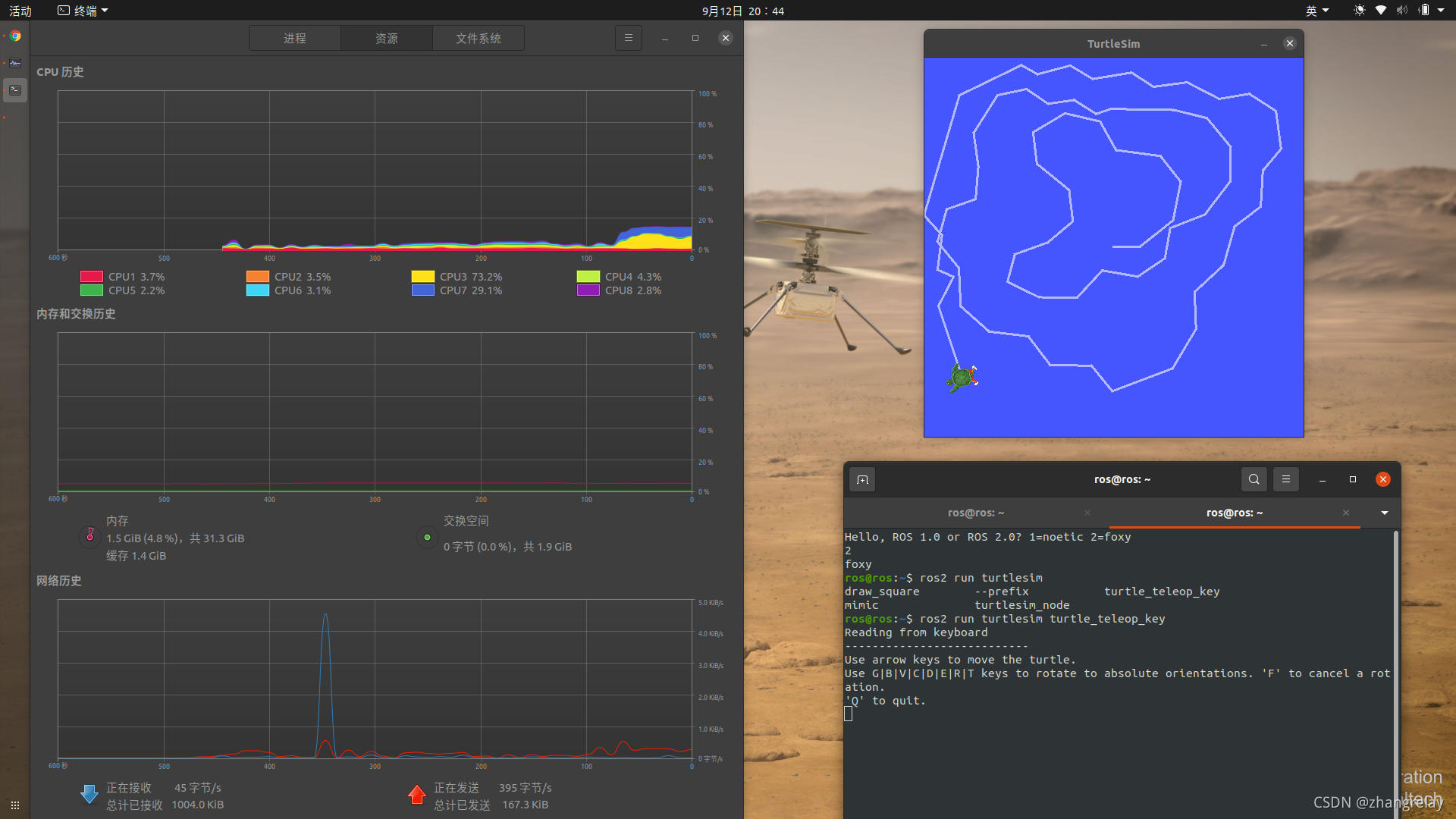
看CPU那起飞的感觉,这就是个turtlesim!
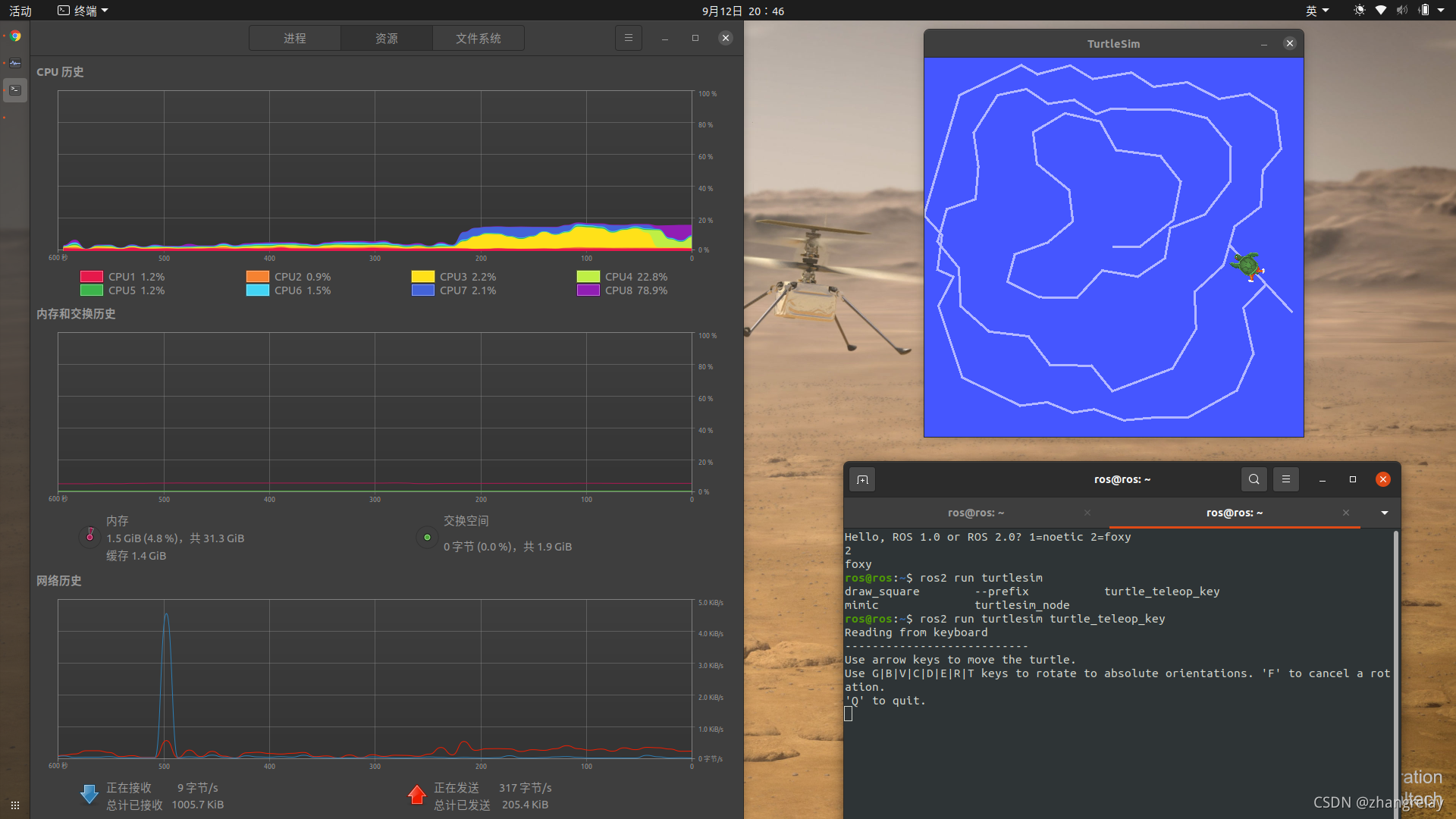
接着看:
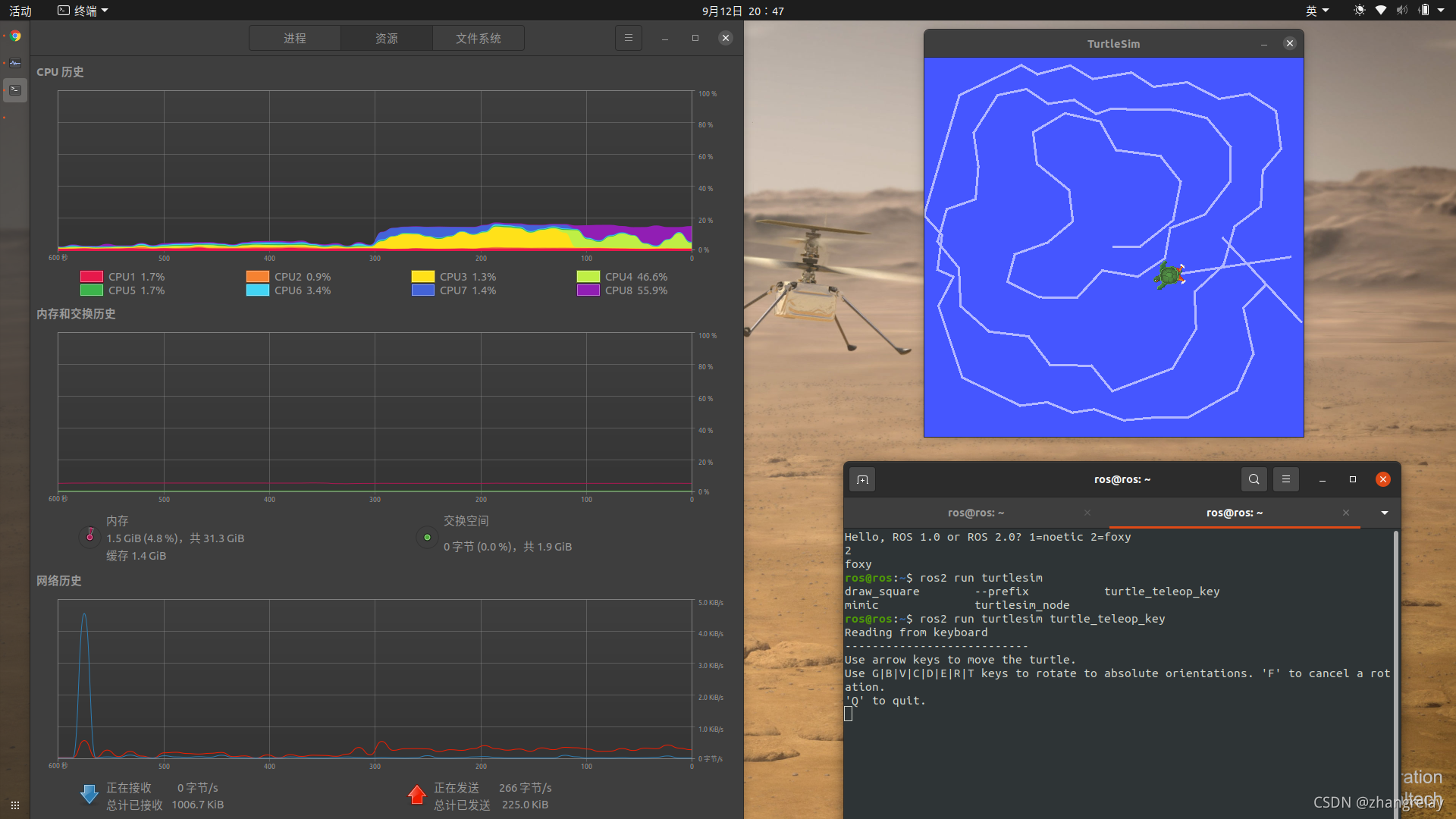
图中ROS1的CPU占用,相比ROS2其实可以算是很低了,可以忽略那种。
都关闭了,看CPU休闲时刻的安逸:
果断终端也关闭!

这里就结束了,ROS1和ROS2融合课,ROS1/2课程融入本科专业课,全部都会免费开放,开发了20+套具备各种bug的教学专业课镜像也会全部免费提供。
ROS1和ROS2如何选?看需求,写过一篇博客如下:
 https://blog.youkuaiyun.com/ZhangRelay/article/details/119878691
https://blog.youkuaiyun.com/ZhangRelay/article/details/119878691


















 1584
1584

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











