



 本文对比了ROS1与ROS2的启动方式,介绍了ros2-launch在Foxy版本中的使用情况及与ros1的区别,并强调了阅读源代码对于深入理解launch文件的重要性。
本文对比了ROS1与ROS2的启动方式,介绍了ros2-launch在Foxy版本中的使用情况及与ros1的区别,并强调了阅读源代码对于深入理解launch文件的重要性。
ros2-launch
通常,学习和使用ROS查阅wiki,如果输入如下网址会有新的收获:
注意区分,docs和wiki的差异。

以Foxy为例,再进一步查阅,可以看到非常好的文档:
新文档中增加了在云端使用ROS2的详细说明!具体自行探索。
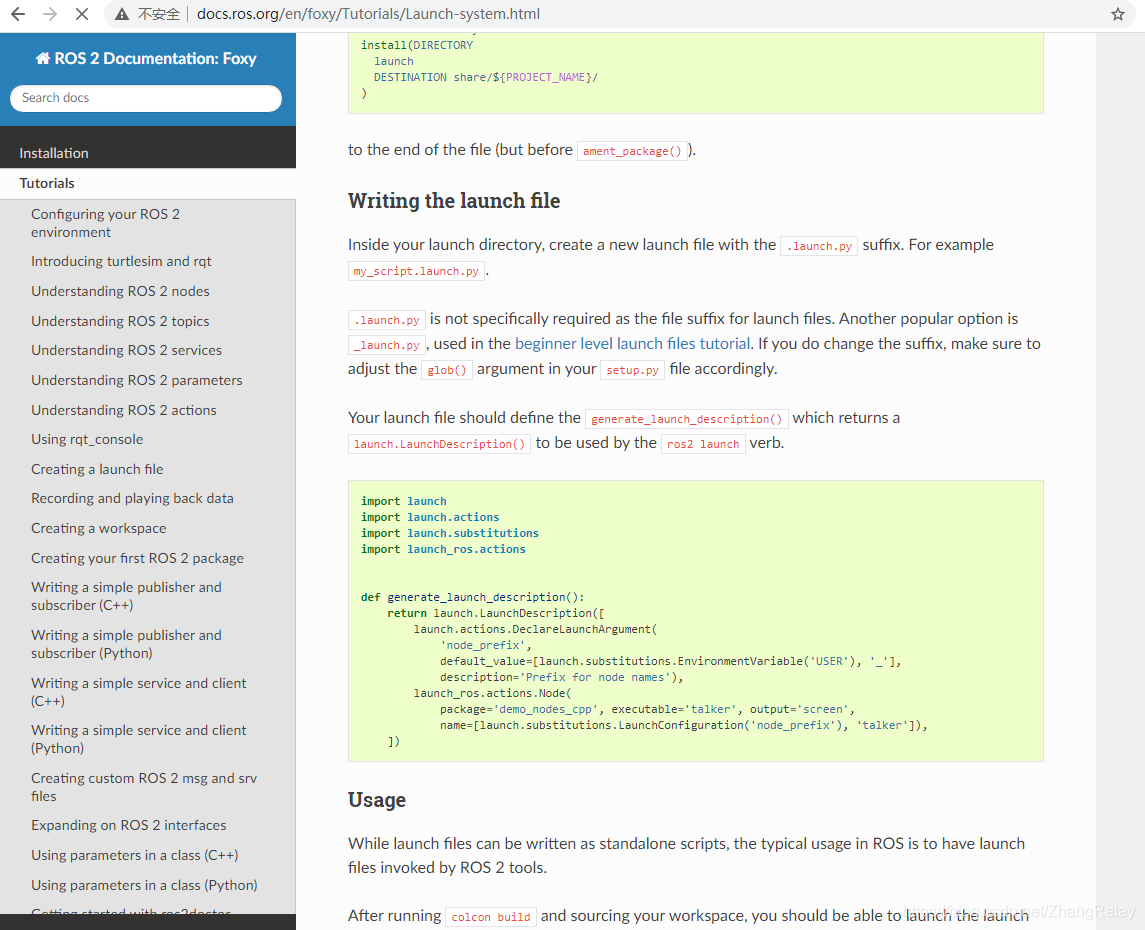
讲到这里,我们回到launch。对比一下ROS1和ROS2
roslaunch-noetic
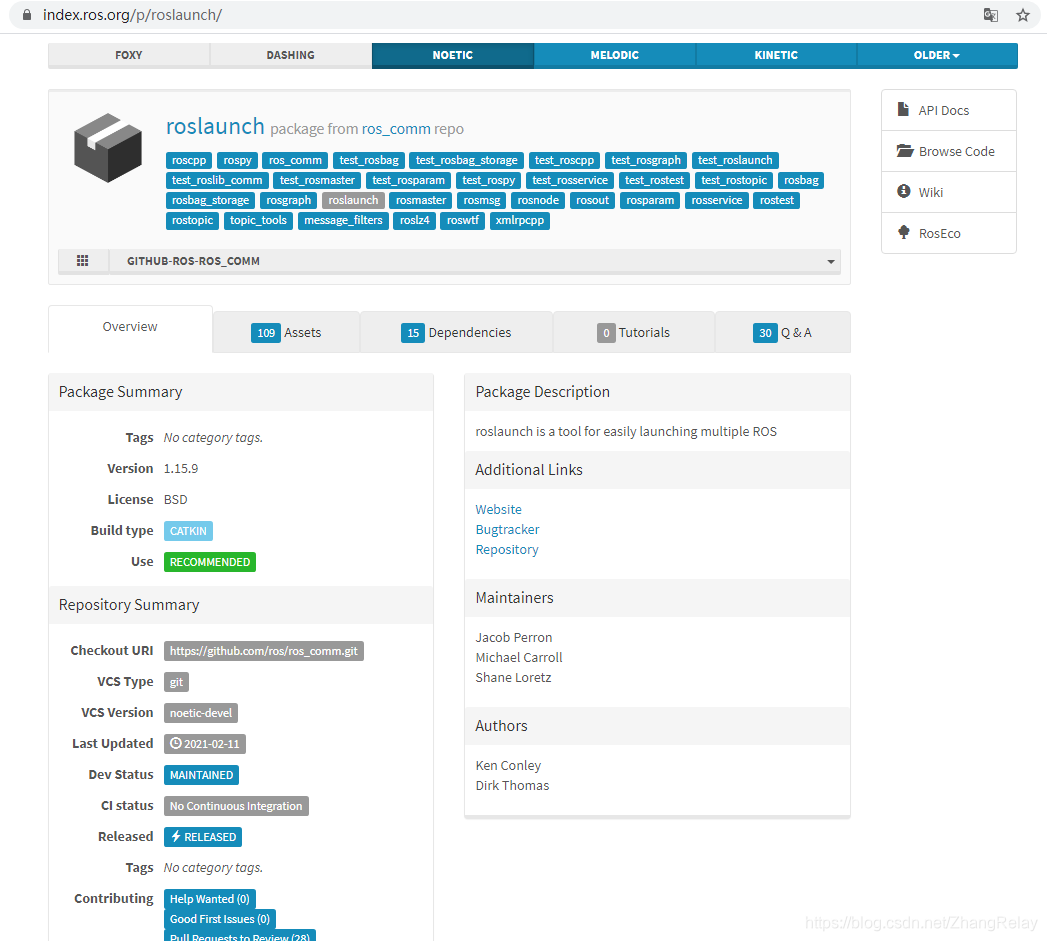
版本1.15.9,可见是稳定的版本,通常版本号>1.0,可以不严谨的认为是相对可靠的版本。
ros2-launch-foxy
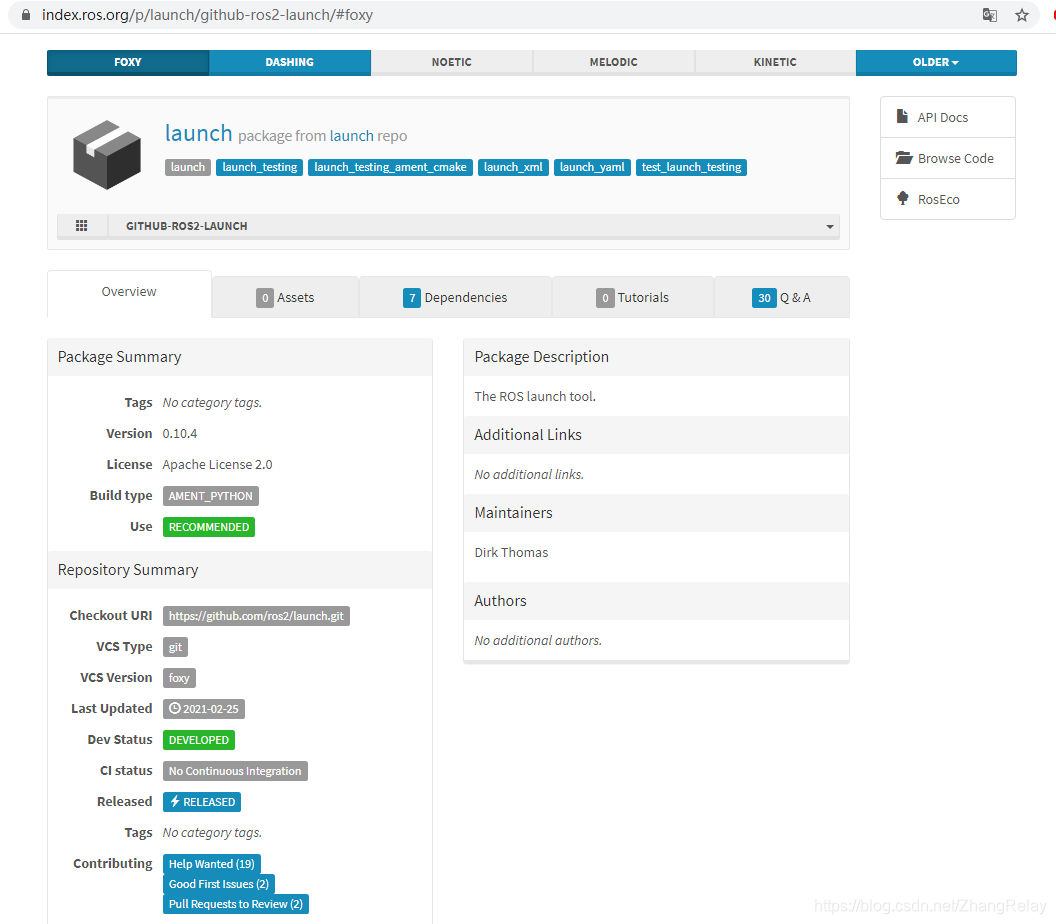
版本0.10.4,这种版本号,两个意思,功能还在快速开发迭代中,文档也不完整!
那么怎么办?
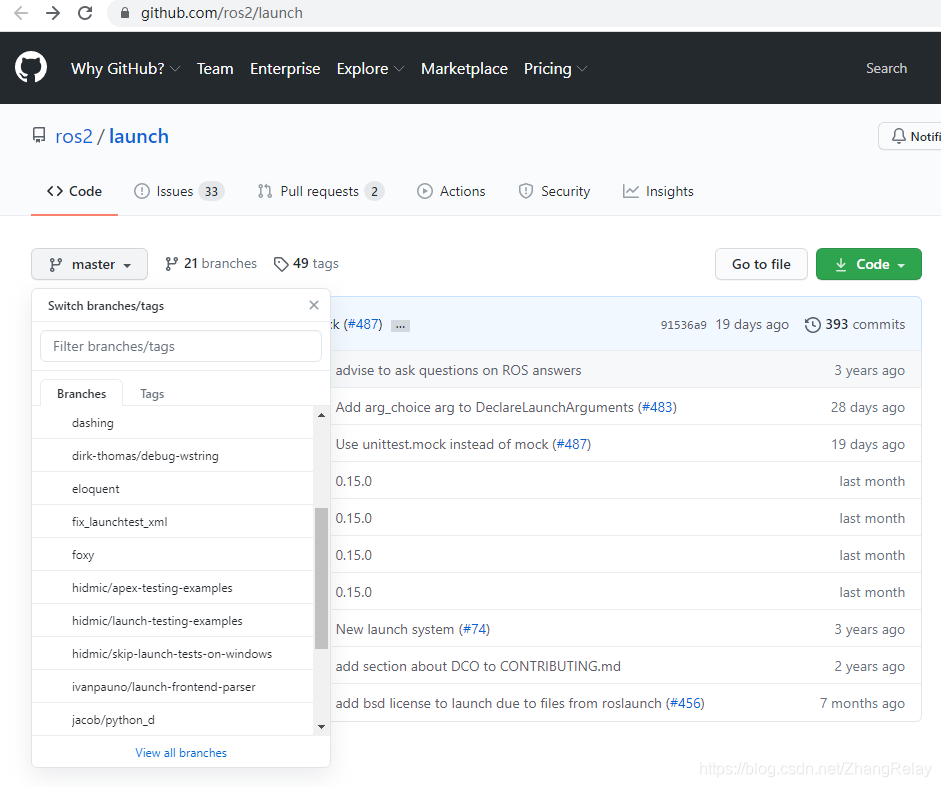
如果想掌握好,docs,wiki,code缺一不可!!!
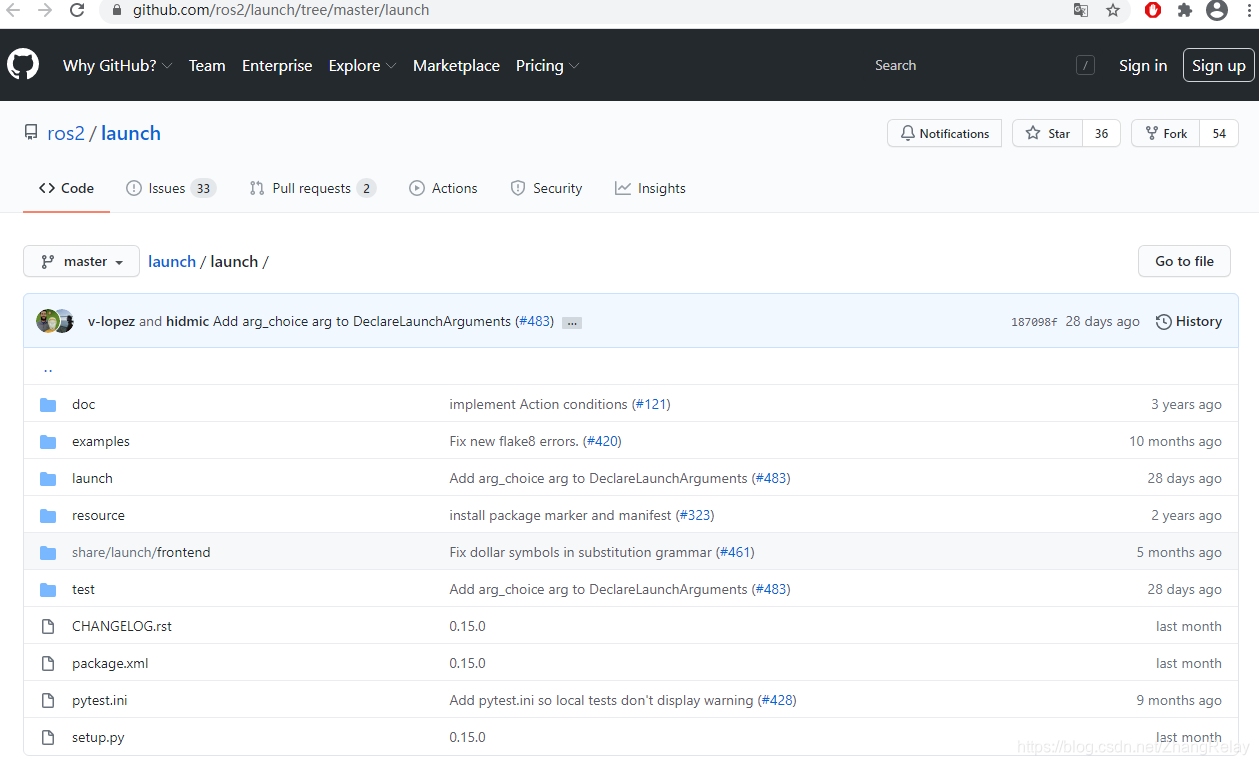
需要阅读ros2 - launch的源代码,这样就能掌握基本的使用,高阶使用自然也轻松,还能自定义launch功能,前提是源码修改!
注意版本号!
有兴趣,就好好研究吧,时间有限,先写到这里。



















 8758
8758








 到【灌水乐园】发言
到【灌水乐园】发言









