




 本文介绍ROS1和ROS2机器人操作系统在Windows系统上的应用情况,包括功能包移植、Arduino支持、仿真软件使用及案例分析。涵盖Turtlebot3、Cozmo、Tello等设备的Windows下ROS操作详情。
本文介绍ROS1和ROS2机器人操作系统在Windows系统上的应用情况,包括功能包移植、Arduino支持、仿真软件使用及案例分析。涵盖Turtlebot3、Cozmo、Tello等设备的Windows下ROS操作详情。
详细信息参考:Windows使用ROS1&2机器人操作系统全面资料汇总
通常而言,Linux下的ros1和ros2功能包通过代码移植,都可以适用于windows系统。
官方的案例如,turtlebot3链接:https://ms-iot.github.io/ROSOnWindows/Turtlebot/Turtlebot3.html
Cozmo和Tello,经过测试也完美支持win10下的ros1和ros2。
仿真案例如Gazebo/Webots/V-Rep都有windows版本应用,不再多举例。
arduino也完全支持在windows下ros1和ros2中使用。
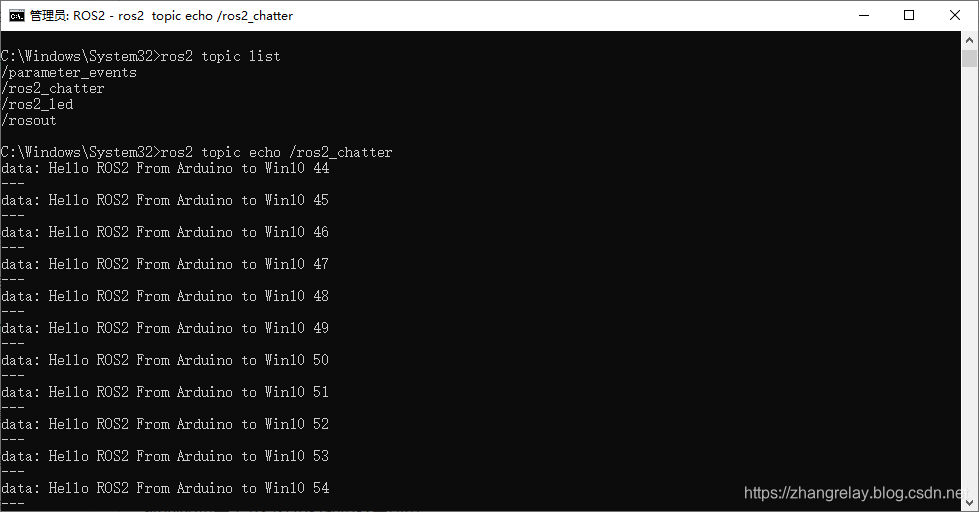
可以自己依据GitHub或ROS1&2官网给出的源码包编译实现,如果报错,依据提示,判断是否能够解决。


















 915
915




 到【灌水乐园】发言
到【灌水乐园】发言









