




源代码在github上自行查找并下载。
这里以ydlidar x4为例:
编译功能包:
colcon build --packages-select ydlidar
运行节点:
ros2 run ydlidar ydlidar_node
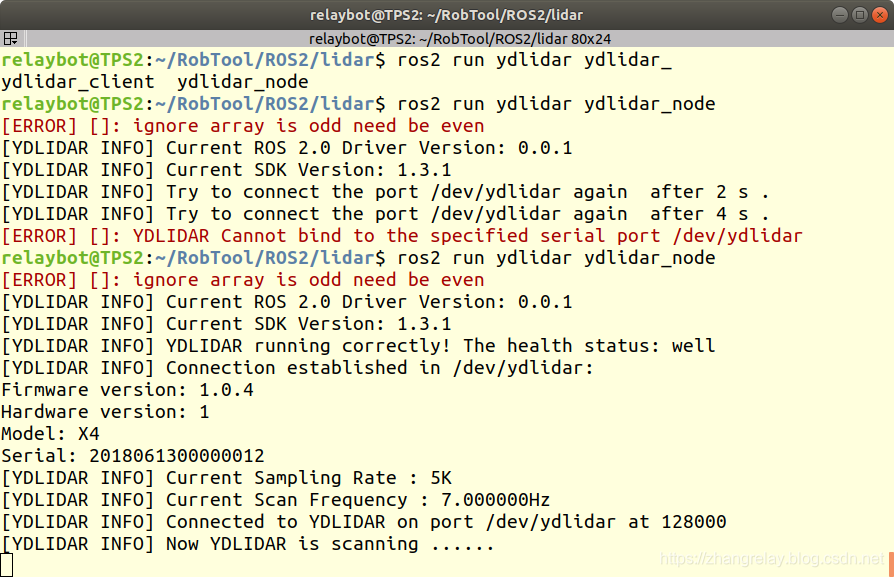
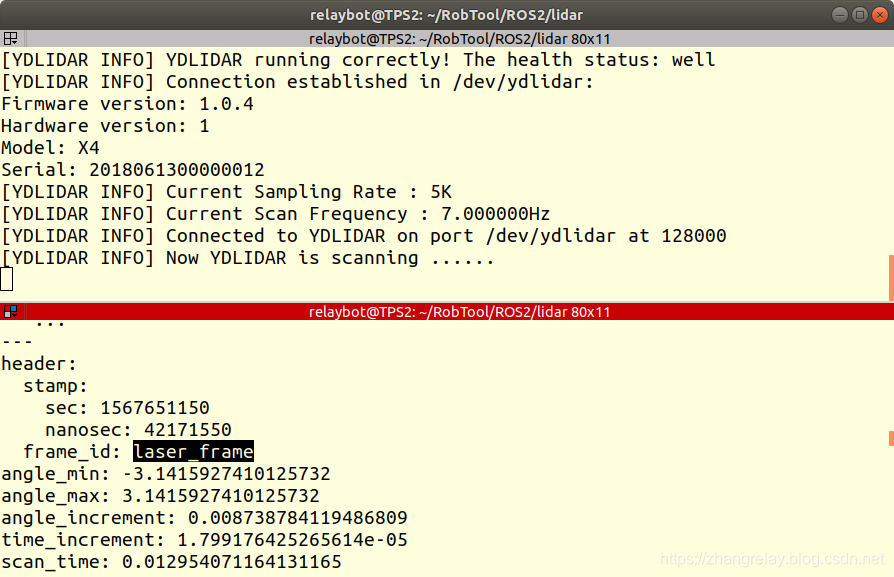
思考题:
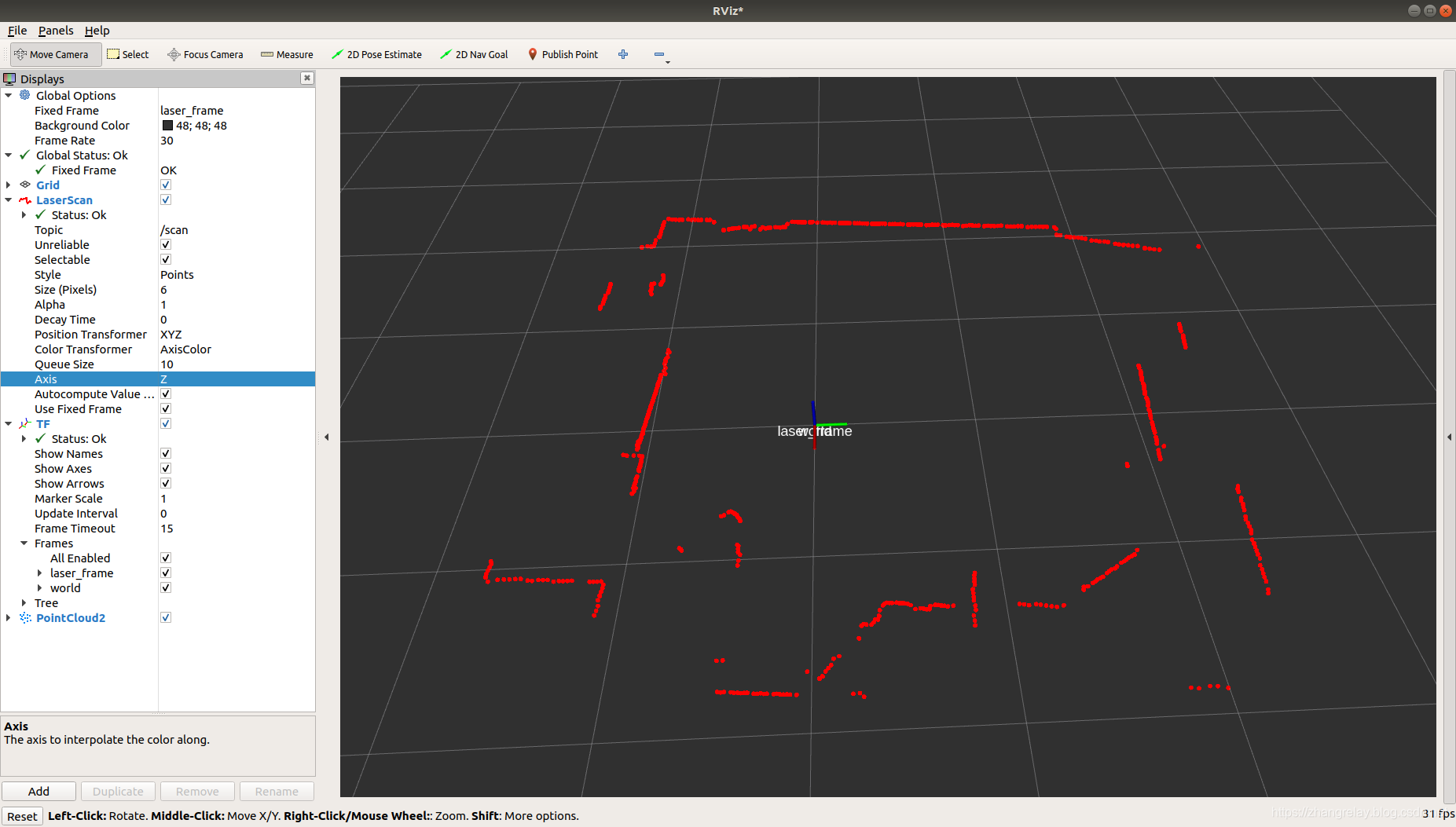
使用激光雷达数据在ros2中建立实际环境地图。
参考turtlebot3案例。
 本文详细介绍了如何在ROS2环境中配置和使用YDLIDARX4激光雷达,包括从GitHub下载源代码、编译功能包、运行节点及在RVIZ2中可视化激光雷达数据的方法。此外,还探讨了如何利用激光雷达数据创建实际环境地图,并提供了参考案例。
本文详细介绍了如何在ROS2环境中配置和使用YDLIDARX4激光雷达,包括从GitHub下载源代码、编译功能包、运行节点及在RVIZ2中可视化激光雷达数据的方法。此外,还探讨了如何利用激光雷达数据创建实际环境地图,并提供了参考案例。
源代码在github上自行查找并下载。
这里以ydlidar x4为例:
编译功能包:
colcon build --packages-select ydlidar
运行节点:
ros2 run ydlidar ydlidar_node
思考题:
使用激光雷达数据在ros2中建立实际环境地图。
参考turtlebot3案例。
 9707
1316
3601
2963
1465
9707
1316
3601
2963
1465

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





























