




image_view usb_cam
1、USB_CAM
USB_CAM:并非传统意义上的Linux驱动,而是一个ROS(Robot Operating System,机器人操作系统)驱动。它是一个应用程序,通过V4L2接口设置摄像头并获取数据,然后利用ROS接口发布主题(Topic),供其他节点使用,V4L2是Linux内核提供给应用程序访问音视频驱动的统一接口,用于采集图片、视频和音频数据。
USB_CAM主要用于ROS环境中,作为连接USB摄像头和ROS系统的桥梁。它负责从摄像头捕获图像或视频数据,并转换为ROS系统可以理解的格式(如sensor_msgs::Image),然后发布到ROS主题上,供其他ROS节点订阅和使用。
在ROS中使用摄像头的前提是,摄像头在Linux系统下是可识别的,通常来说UVC协议的USB摄像头都可以正常使用,大部分笔记本电脑自带的摄像头都是UVC协议的,所以也可以直接使用。
1、安装usb_cam包
pip install pydantic==1.10.14
sudo apt install ros-humble-usb-cam
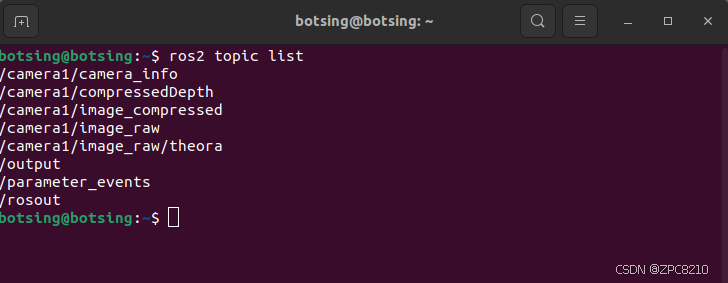
# 测试打开相机
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 5067
5067

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









