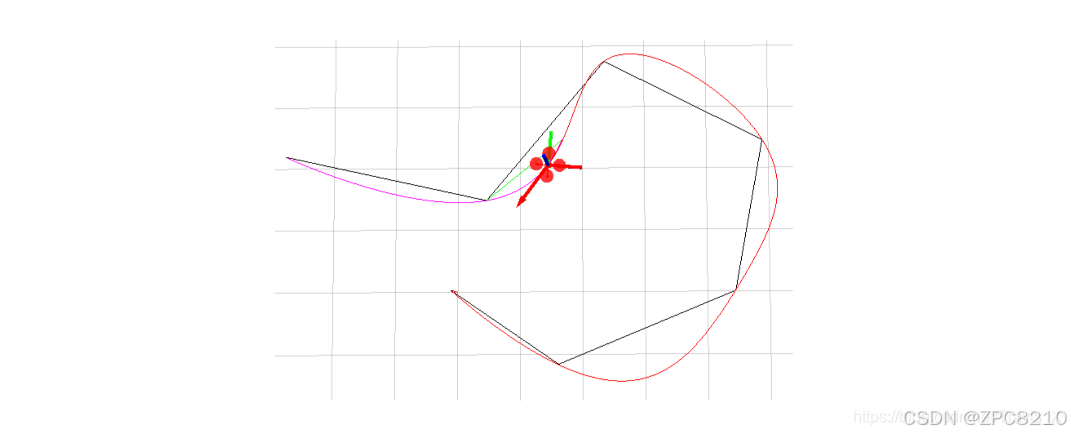
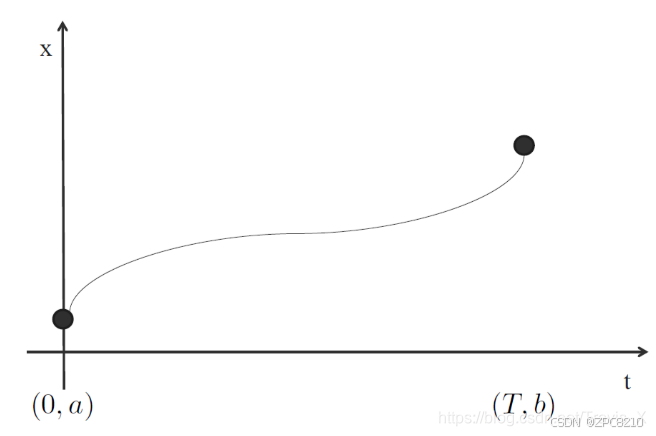
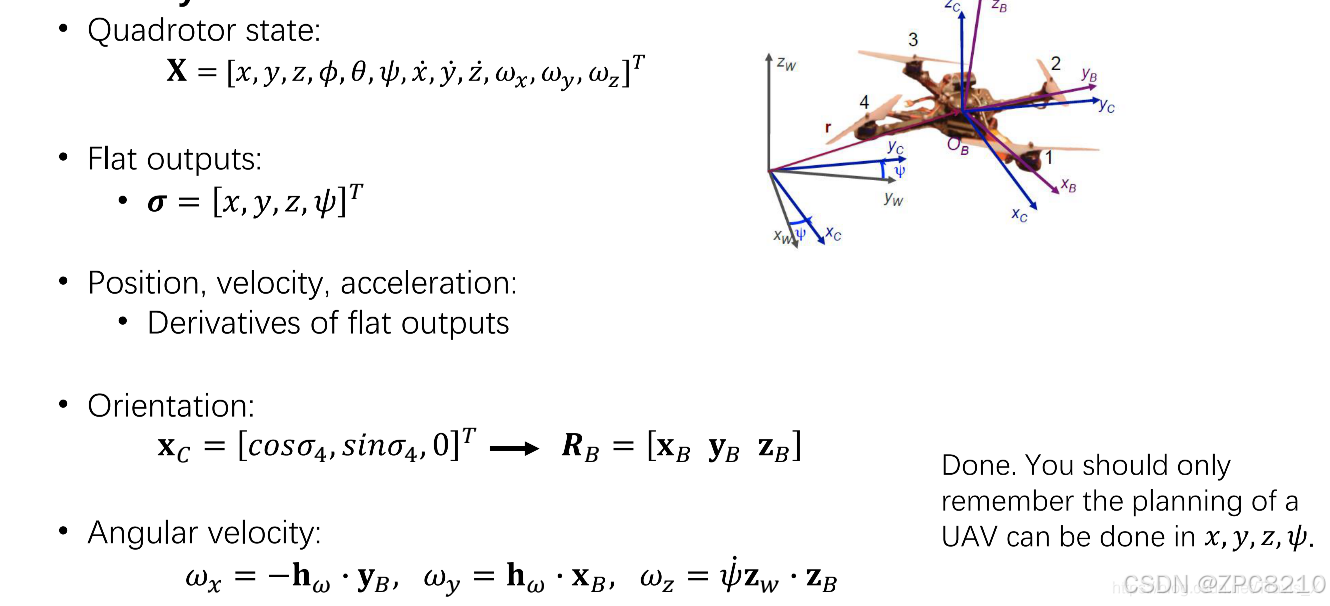
1.为什么需要平滑轨迹? 为了更好地自主移动。 速度不能立即改变。 机器人不应该在转弯时停止。 节省能量,经常地加减速会减少能量。 2.平滑轨迹生成 边界条件:开始、目标位置(方向) 中间条件:航路点位置(方向) •可通过路径规划(A*、RRT*等)找到航路点 平滑度的标准 通常是转化为最小化“输入”的变化率 一、微分平坦 系统状态可以被平坦空间的状态以及他们的导数所组成的代数组合所表示。 无人机一般认为有12个维度: 二、Minimum-snap 1.平滑的一维轨迹 简单的BVP问题(两点边界值问题),已知始末状态,通过参数化来调整平滑度。 使用五次多项式来描述这段轨迹:

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 935
935





