




微信搜索:ReCclay,即可免费阅读博主蓝桥系列所有文章,后台回复“代码”即可获取蓝桥所有备赛代码!关注博主公众号,还可拥有加入博主粉丝群实时沟通技术难题、免费下载优快云资源等多项福利,还在等什么呢?快快扫码关注,学习才不会迷路。

这里再向各位同学推荐一个优快云博主 ReRrain 的蓝桥备赛博客,博主秉持初学者思路,向你讲述自己蓝桥备赛的心路历程,娓娓道来蓝桥备赛经验,个人觉得非常不错,值得细细品读。
导读:《蓝桥杯嵌入式组》专栏文章是博主2019年参加蓝桥杯的嵌入式组比赛所做的学习笔记,在当年的比赛中,由于忙于准备考研及保研相关工作,博主仅仅参加了当年的省赛,并获得了省赛一等奖的成绩。成绩虽谈不上最好,但至少问心无愧。如今2021年回头再看该系列文章,仍然感触颇多。为了能更好地帮助到单片机初学者,今年特地抽出时间对当年的文章逻辑和结构进行重构,以达到初学者快速上手的目的。需要指出的是,由于本人水平有限,如有错误还请读者指出,非常感谢。那么,接下来让我们一起开始愉快的学习吧。
“一叶遮目,不见泰山”。不论何事,只有把握事情的总体趋势,才能做到心中有数。
之前的博文中介绍了移植官方例程捕获频率的方法,今天在其基础上再来看看如何捕获对应的占空比.
大部分内容和输入捕获(一)类似,这里只贴出不一样的
一、主要代码
main.c
/*******************************************************************************
* 文件名:main.c
* 描 述:
* 作 者:CLAY
* 版本号:v1.0.0
* 日 期: 2019年2月19日
* 备 注:修改后的LCD例程
* PA7 (TIM3_CH2) 输入捕获外来信号频率(两次上升沿)
*******************************************************************************
*/
#include "stm32f10x.h"
#include "lcd.h"
#include "e2prom.h"
#include "stdio.h"
#include "i2c.h"
#include "adc.h"
#include "rtc.h"
#include "usart2.h"
#include "pwm.h"
#include "pwm_oc.h"
#include "pwm_ic.h"
#include "timer.h"
u32 TimingDelay = 0;
//全局变量
u8 flag200ms = 0;
u8 str[20];
//串口相关
u8 RxdCnt = 0;
u8 RxdOver = 0;
u8 RxdBuf[20];
//RTC相关
u8 RTC_Flag = 0;
//捕获相关
extern u8 TIM3_CH2_CAPTURE_MODE;
extern u32 TIM3_CH2_CAPTURE_H;
extern u32 TIM3_CH2_CAPTURE_HL;
void Delay_Ms(u32 nTime);
//Main Body
int main(void)
{
u8 str[20];
STM3210B_LCD_Init();
LCD_Clear(Blue);
LCD_SetBackColor(Blue);
LCD_SetTextColor(White);
SysTick_Config(SystemCoreClock/1000);
TIM4_Init(2000 ,72);//定时2ms
PWM_OC_Init(500, 60);//500Hz 60%方波
PWM_IC_Init();
while(1)
{
if(flag200ms)
{
flag200ms = 0;
if(TIM3_CH2_CAPTURE_MODE == 3)
{
sprintf((char*)str, " Freq = %d Hz ", 1000000 / TIM3_CH2_CAPTURE_HL);
LCD_DisplayStringLine(Line3, str);
sprintf((char*)str, " Duty = %d %% ", TIM3_CH2_CAPTURE_H * 100 / TIM3_CH2_CAPTURE_HL);
LCD_DisplayStringLine(Line5, str);
TIM3_CH2_CAPTURE_MODE = 0;
}
}
}
}
//
void Delay_Ms(u32 nTime)
{
TimingDelay = nTime;
while(TimingDelay != 0);
}
stm32f10x_it.c
u8 TIM3_CH2_CAPTURE_MODE = 0;//捕获所在位置
u32 TIM3_CH2_CAPTURE_H = 0;//第一次上升沿
u32 TIM3_CH2_CAPTURE_HL = 0;//第一个下降沿
void TIM3_IRQHandler(void)
{
if(TIM_GetITStatus(TIM3, TIM_IT_CC2) == SET)
{
TIM_ClearITPendingBit(TIM3, TIM_IT_CC2);
switch(TIM3_CH2_CAPTURE_MODE)
{
case 0: TIM3_CH2_CAPTURE_MODE = 1;
TIM3_CH2_CAPTURE_H = 0;
TIM3_CH2_CAPTURE_HL = 0;
TIM_SetCounter(TIM3, 0);//清零第一次上升沿计数器
TIM_OC2PolarityConfig(TIM3, TIM_ICPolarity_Falling);//改为下降沿触发
break;
case 1: TIM3_CH2_CAPTURE_MODE = 2;
TIM3_CH2_CAPTURE_H = TIM_GetCounter(TIM3);//获取第一次下降沿的计数值
TIM_OC2PolarityConfig(TIM3, TIM_ICPolarity_Rising);
break;
case 2: TIM3_CH2_CAPTURE_MODE = 3;
TIM3_CH2_CAPTURE_HL = TIM_GetCounter(TIM3);
break;
default: break;
}
}
}
二、注意事项
2.1、基本思路
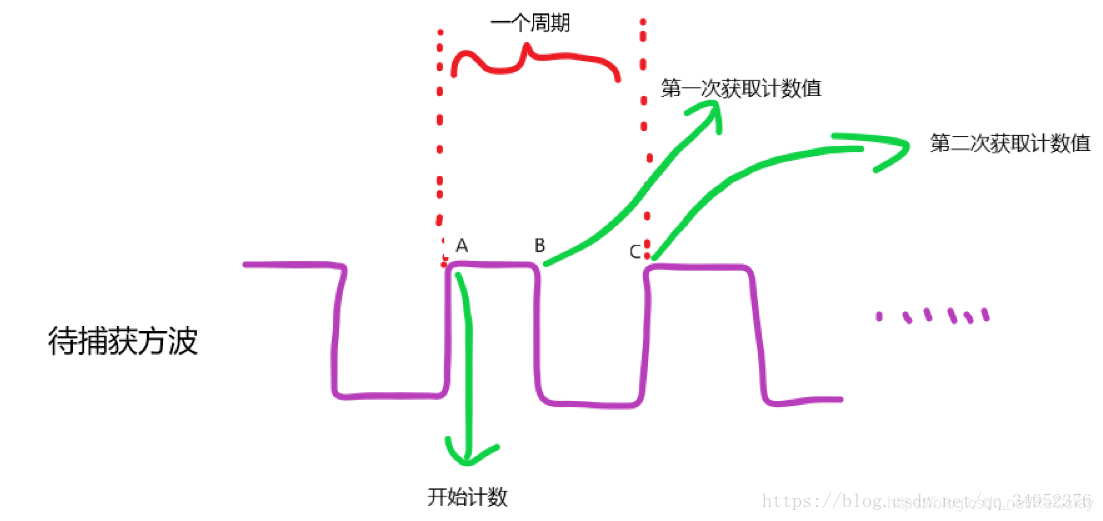
紫色部分为我们输入的方波信号。
首先我们刚开始时要把捕获通道设置为上升沿触发假如我们捕获到了一个上升沿,也就是到达了A点,那么我们的定时器就开始计数,随后我们还要把捕获通道设置成为下降沿触发。
当我们捕获了一个下降沿时,也就是到达了B点,那么我们获取一个计数值,定时器还得继续计数,同时重新把捕获通道设置为上升沿触发。
直到再次捕获到了一个上升沿,那么就代表已经到达C点了,我们再获取一次计数值,然后再把捕获通道设置为上升沿触发,以备下次使用。
2.2、占空比和频率计算
占空比 = 第一次捕获值 / 第二次捕获值
周期 = 1000000 / 第二次捕获值
2.3、重新设置通道模式函数
TIM_OC2PolarityConfig(TIM3, TIM_ICPolarity_Falling);//改为下降沿触发
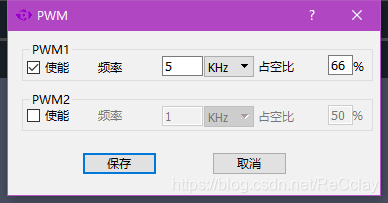
三、实验结果

结语:以上就是本篇文章的全部内容啦,希望大家可以多多支持我的原创文章。如有错误,请及时指正,非常感谢。
微信搜索:ReCclay,即可免费阅读博主蓝桥系列所有文章,后台回复“代码”即可获取蓝桥所有备赛代码!关注博主公众号,还可拥有加入博主粉丝群实时沟通技术难题、免费下载优快云资源等多项福利,还在等什么呢?快快扫码关注,学习才不会迷路。



















 711
711

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











