







 本文详细梳理了TDA2x芯片上的vip_single_cam_lane_detection算法,首先展示了程序流程图,接着深入分析了算法的四个关键部分。通过VSCode的全局搜索功能,可以方便地定位到每个算法的实现。文章重点关注了算法中与车道检测密切相关的部分。
本文详细梳理了TDA2x芯片上的vip_single_cam_lane_detection算法,首先展示了程序流程图,接着深入分析了算法的四个关键部分。通过VSCode的全局搜索功能,可以方便地定位到每个算法的实现。文章重点关注了算法中与车道检测密切相关的部分。
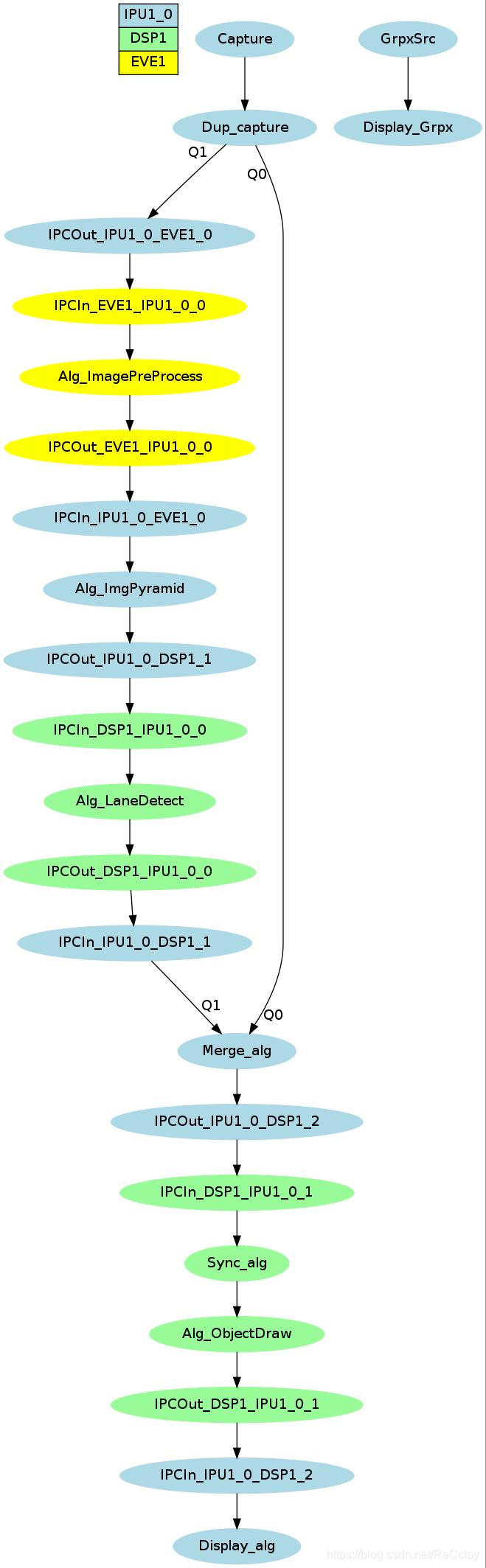
一、毋庸置疑,先上程序流图
二、各个算法分析
这个usecase总共用到了四个算法,分别是:Alg_ImgPreProcess、Alg_ImgPyramid、Alg_LaneDect、Alg_ObjectDraw,这里我们一一分析。
打开chains_vipSingleCameraLaneDetect_priv.c文件,找到Void chains_vipSingleCameraLaneDetect_SetPrms(chains_vipSingleCameraLaneDetectObj *pObj)函数,我们可以看到四个算法对应的算法ID,如下图所示。
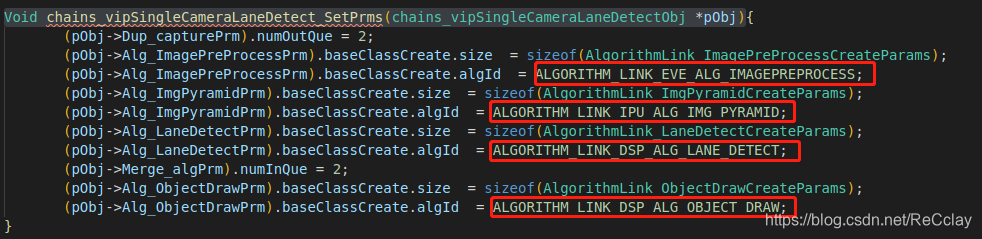
显然了,这也是我们学习和修改这些算法的入口点!
通过VSCode的全局搜索功能,我们可以找到算法的实现。

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 593
593

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











