



【Ubuntu22.04】ROS2-Humble——命令行操作
一、turtlesim
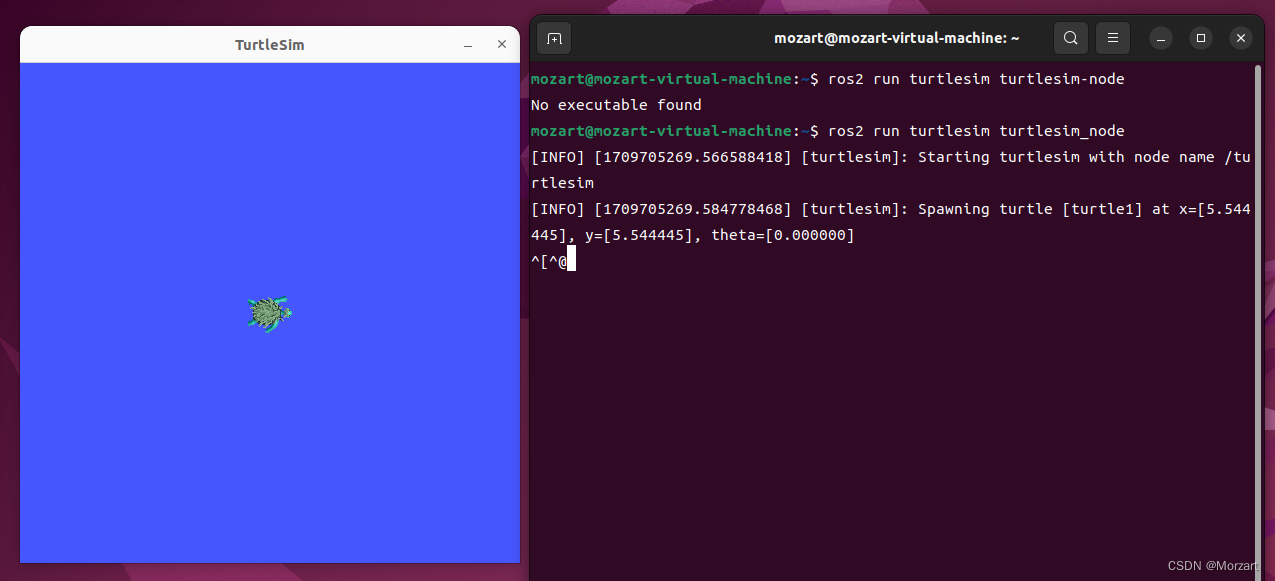
1.启动turtlesim
①打开海龟仿真器的节点
ros2 run turtlesim turtlesim_node
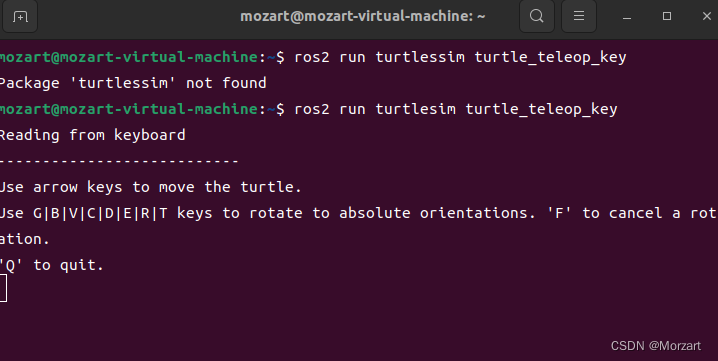
②读取键盘的值,控制小海龟
ros2 run turtlesim turtle_teleop_key
2.node
ros2 node
①查看正在运行的节点
ros2 node list

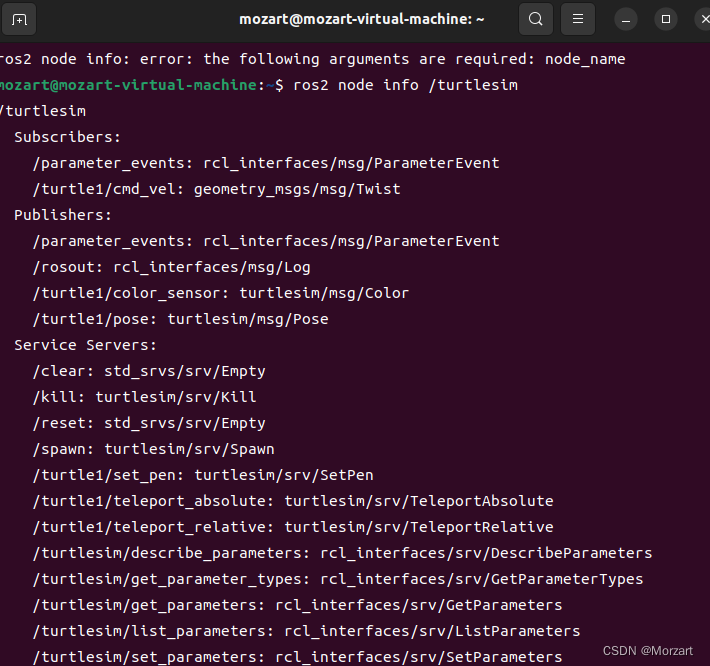
②查看turtlesim节点的信息
ros2 node info /turtlesim
3.topic
turtlesim的数据大部分是通过话题来发布和订阅来的
ros2 topic
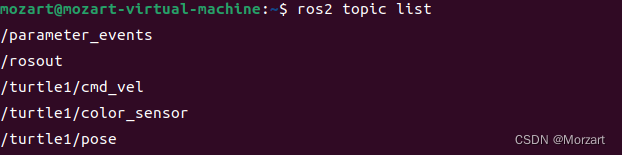
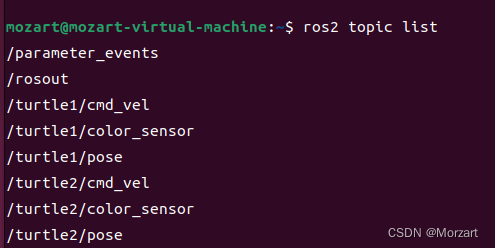
①系统中哪些话题在运行
ros2 topic list
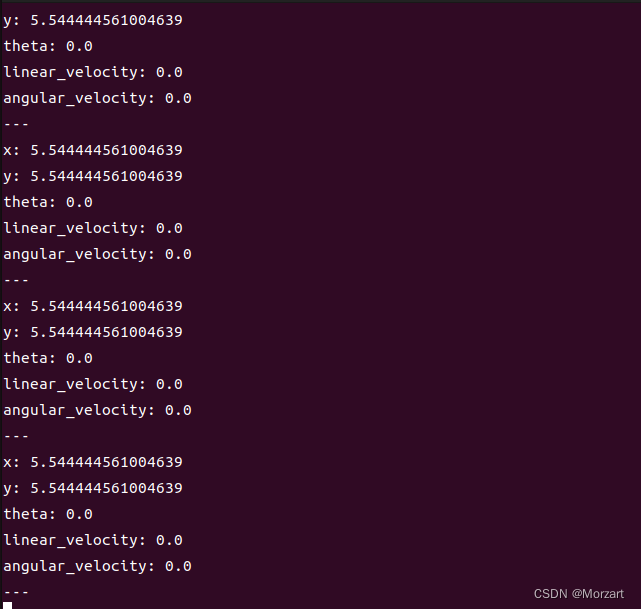
②订阅话题并打印出来
ros2 topic echo /turtle/pose
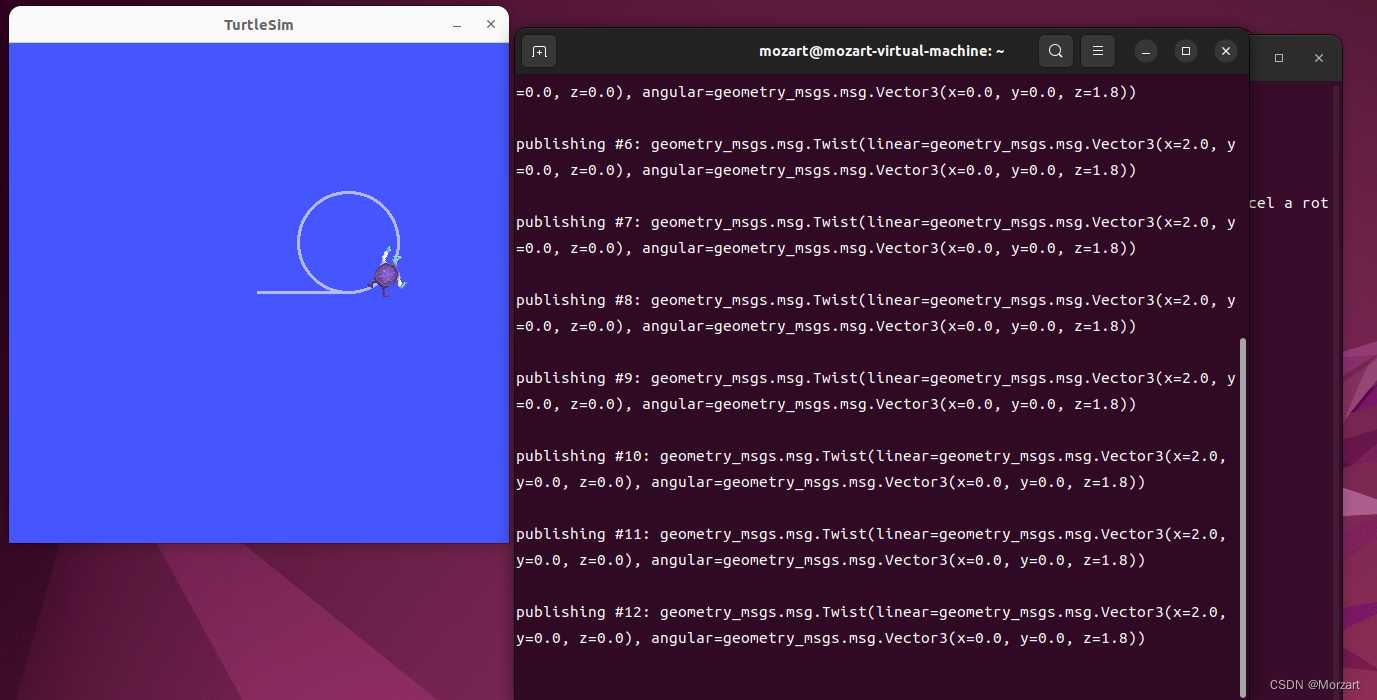
③使用topic控制turtle的运行
ros2 topic pub --rate 1 /turtle1/cmd_vel geometry
_msgs/msg/Twist "{linear:{x: 2.0,y: 0.0,z: 0.0}, angular:{x: 0.0,y: 0.0,z: 1.8}}"
//ros2 topic pub 发布一个话题
//--rate 1 发布的频率 1s发布一次
// /turtle1/cmd_vel 指令针对cmd_vel(控制速度的接口)
//geometry_msgs/msg/Twist 指令的数据结构是此结构
//"{linear:{x: 2.0,y: 0.0,z: 0.0}, 线速度
// angular:{x: 0.0,y: 0.0,z: 1.8}}" 角速度
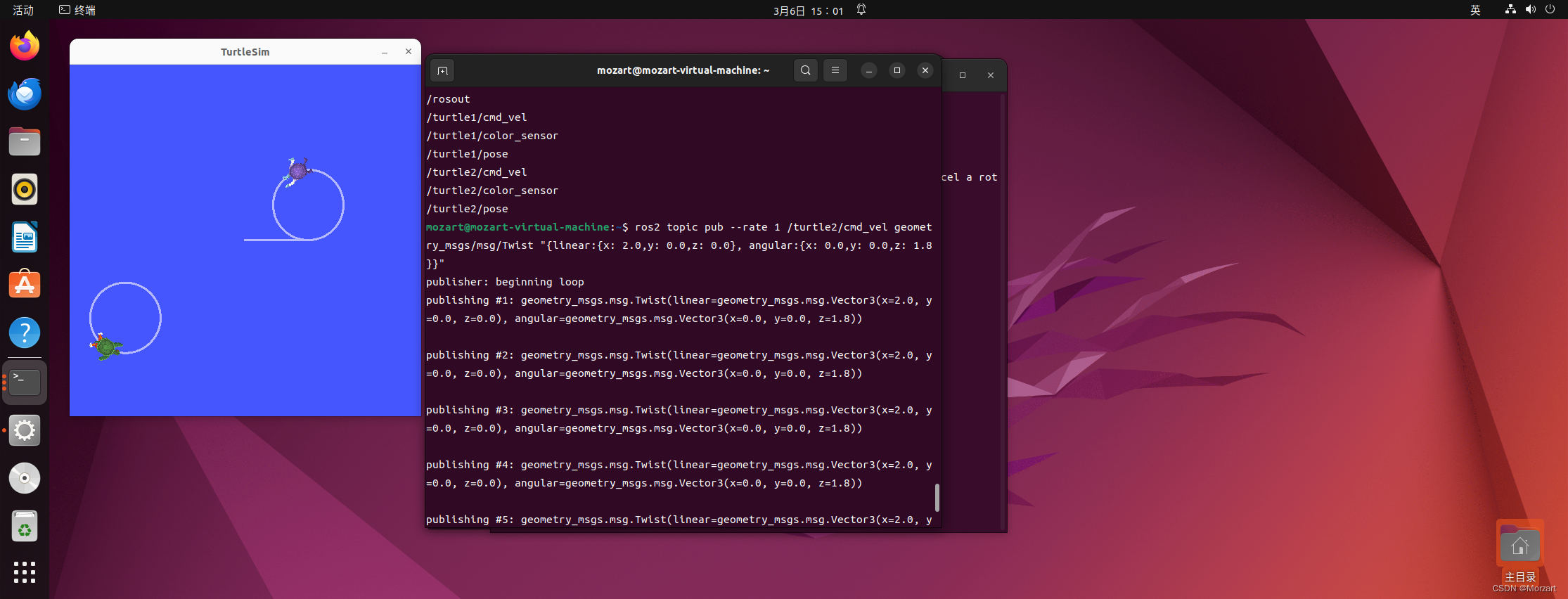
④添加一个新海龟
ros2 service call /spawn turtlesim/srv/Spawn "{x: 2, y: 2, theta: 0.2, name: ''}"
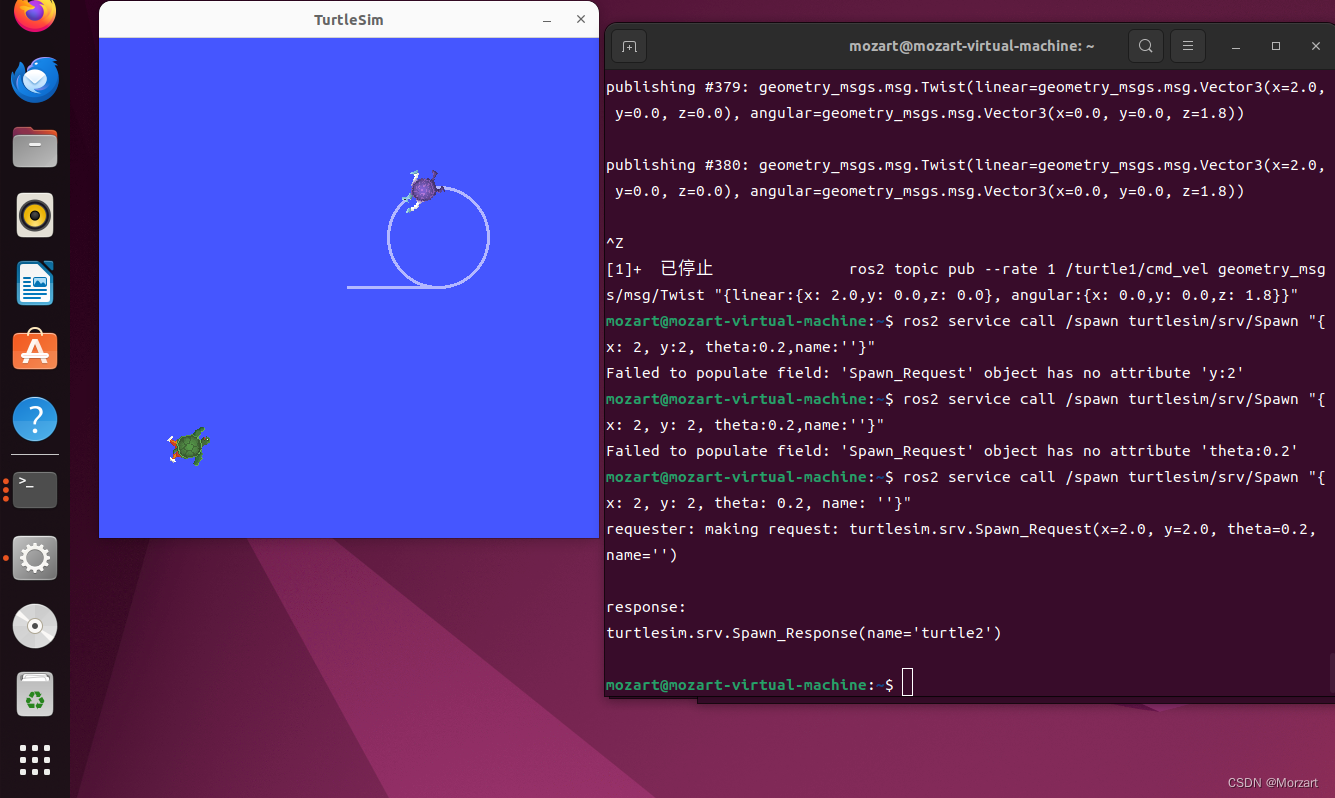
通过 topic list 可查看到多了一个turtle2
将上面的画圆命令中的接口turtle1改为turtle2后,第二个小海龟也开始画圆
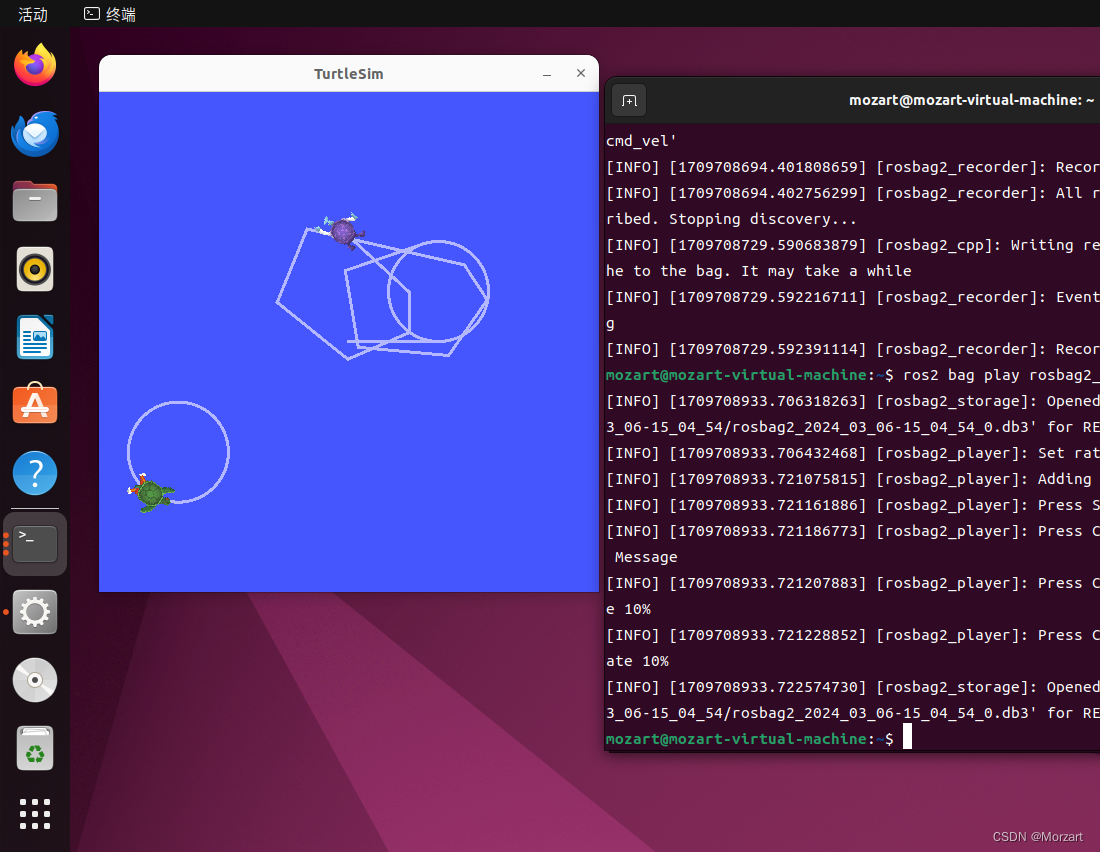
4.bag
①录制输入的指令,以便后续复现
ros2 bag record /turtle1/cmd_vel
输入后,在key中操作turtle1,完成后按ctrl+c结束录制
②复现保存下来的指令
ros2 bag play 保存下来的文件名称

















 3131
3131

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









