










把IMU与电脑相连:
第一步: 安装驱动(kinetic版本)
本人使用的XSENS型号为MTI-1 ,首先在ubuntu 中安装XSENS的驱动(KINETIC)版本
命令如下:
sudo apt-get install ros-kinetic-xsens-driver
一个窗口运行roscore
再新开一个窗口运行如下命令
rosstack profile
rospack profile
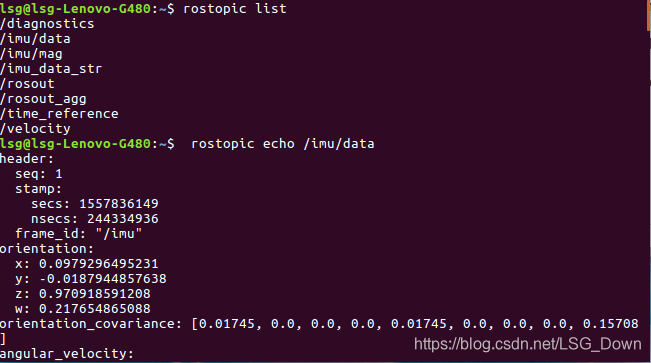
第二步:测试XSENX
sudo chmod 777 /dev/ttyUSB*
roslaunch xsens_driver xsens_driver.launch
rostopic list
rostopic echo /imu/data


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









