






 当尝试运行`sudorosdepinit`时遇到从`raw.githubusercontent.com`下载默认源失败的错误,可以通过手动编辑`/etc/hosts`文件来解决。首先访问该网站获取IP地址,例如日本和美国的IP。在`hosts`文件中添加这些IP及域名,然后重新运行命令。如果一次不成功,可尝试使用其他备用IP。这种方法通过hosts文件直接映射域名到IP,避免了通过DNS解析的问题。
当尝试运行`sudorosdepinit`时遇到从`raw.githubusercontent.com`下载默认源失败的错误,可以通过手动编辑`/etc/hosts`文件来解决。首先访问该网站获取IP地址,例如日本和美国的IP。在`hosts`文件中添加这些IP及域名,然后重新运行命令。如果一次不成功,可尝试使用其他备用IP。这种方法通过hosts文件直接映射域名到IP,避免了通过DNS解析的问题。
报错如下:
ERROR: cannot download default sources list from:
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down.解决方法;
点击这个网站,然后输入报错中的域名 raw.githubusercontent.com ,即可查到多个域名解析IP地址,我把这些地址贴到文末方便复制。在这些地址里挑一个,继续以下操作

输入命令;
sudo gedit /etc/hosts打开hosts文件,将刚才挑的域名IP 及其域名填入文件中保存,如下;
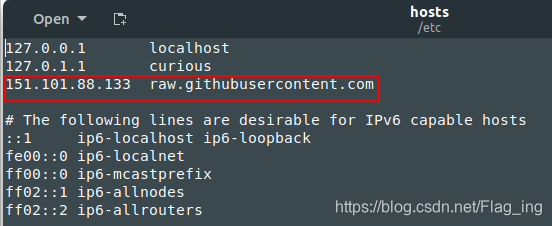
(关于这么做的原理(hosts文件是干什么的)可以参考:/etc/hosts文件作用_李志刚的博客_新浪博客)
之后重新输入命令 sudo rosdep init 成功解决问题。如果还不行,就在上面查询的域名中重新找一个填入hosts中,我就是在试第二个的时候成功的。
raw.githubusercontent.com服务器iP:
当前解析:
日本 东京151.101.108.133
日本 大阪151.101.88.133
日本 东京151.101.228.133
美国151.101.0.133
保留地址0.0.0.0
中国 香港151.101.76.133


















 7630
7630

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











