




 本文探讨了相似矩阵的概念,阐述了矩阵在不同基下的代数表达,并深入解析了相似对角化的概念,重点介绍了对称矩阵对角化的条件。通过实例说明如何找到简单的对角矩阵表示,并揭示了特征值在对角化过程中的关键作用。
本文探讨了相似矩阵的概念,阐述了矩阵在不同基下的代数表达,并深入解析了相似对角化的概念,重点介绍了对称矩阵对角化的条件。通过实例说明如何找到简单的对角矩阵表示,并揭示了特征值在对角化过程中的关键作用。
相似矩阵与矩阵的相似对角化
一、相似矩阵
首先我们来看教材的定义:
定义:设 A , B \boldsymbol{A}, \boldsymbol{B} A,B 都是 n n n 阶矩阵,若存在可逆矩阵 P \boldsymbol{P} P,使得 P − 1 A P = B \boldsymbol{P}^{-1} \boldsymbol{A P}=\boldsymbol{B} P−1AP=B,则称 B \boldsymbol{B} B 是 A \boldsymbol{A} A 的相似矩阵,或 A \boldsymbol{A} A 相似于 B \boldsymbol{B} B,记成 A ∼ B \boldsymbol{A} \sim \boldsymbol{B} A∼B. ——永乐全书P256
根据我们对矩阵乘法的理解(参考之前的文章),我们都知道矩阵其实是一种线性变换,那么,如果对于一个向量,左乘或者右乘一个矩阵其实就是施加了一次线性变换操作。
一个向量的基本特征包括方向和模长。通常情况下我们会采用“坐标”的方式去描述一个向量。也就是我们用一组数值去刻画一个向量的特征。而且这个坐标的坐标系会选取自然坐标系(自然基)。那么,向量还是这个向量,我们换一个坐标系去描述这个向量,可不可以呢?
我们尝试选取另外一组基去表示这个向量,然后我们发现,向量的坐标,或者说代表向量的数值产生了变化。那么这个向量还是原来的向量吗?是的,因为这个向量的方向和模长并没有发生变化。只是我们采用了与以往不同的视角去看待它了。
在理解这个地方的时候,我们通常会提到一个著名且有趣的比喻:猪照理论。即我们用照相机在不同的位置对一只猪进行拍照,我们洗出来的照片肯定是不相同的,但猪猪还是那个猪猪,这是不变的。
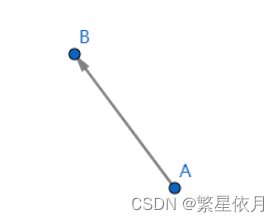
我们把这套理论扩展到矩阵,首先,由于我们可以把矩阵看作成一个列向量组,我们依然可以用向量的视角去讨论它们;其次,矩阵本质上也是它所代表的线性变换操作,所以两个矩阵相乘可以表达对列向量组进行基变换的过程。比如说这样一个矩阵 A A A ,它代表将某个向量旋转 θ \theta θ 度,拉伸 λ \lambda λ 倍,那么在直角坐标系下的变换可能如下图所示:
接下来我们对向量进行如下操作:
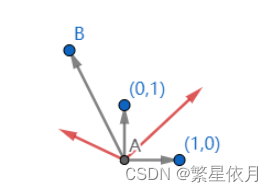
首先,我改变该线性变换所在的基,那么从数值表示上来看,向量和矩阵的数值都发生了改变。
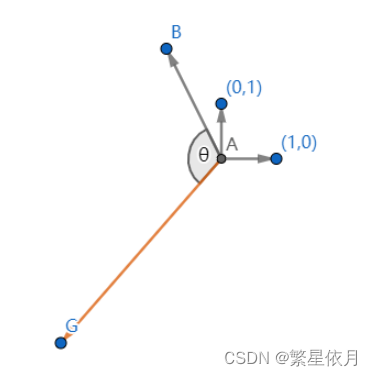
然后,在新的基下,我对向量施加 A A A 线性变换,得到新的向量。此时,我们会发现,不考虑数值特征的话,该向量变换前后的几何含义是一样的,也是旋转 θ \theta
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 888
888

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









