




 本文详细解析了柱面坐标和球面坐标的三重积分变换,包括变量代换、投影分析和实际问题的应用,重点讲解了如何将立体积分转化为极坐标下的累次积分,并通过实例演示了球面坐标系在处理球体和锥面问题中的优势。
本文详细解析了柱面坐标和球面坐标的三重积分变换,包括变量代换、投影分析和实际问题的应用,重点讲解了如何将立体积分转化为极坐标下的累次积分,并通过实例演示了球面坐标系在处理球体和锥面问题中的优势。
繁星数学随想录·笔记卷
摘录卷
三重积分下的坐标系变换
一、柱面坐标系下的计算
01 柱面坐标的变量代换
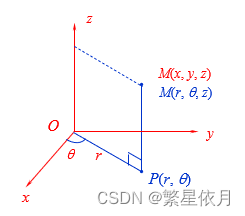
这个坐标系实际上就是 xyxyxy 坐标转变为极坐标,即变换公式为 { x=rcosθy=rsinθz=z\left\{\begin{array}{c}x=r \cos \theta \\ y=r \sin \theta \\ z=z\end{array}\right.⎩⎨⎧x=rcosθy=rsinθz=z
由于雅可比行列式满足:
∂(x,y,z)∂(r,θ,z)=∣cosθsinθ0−rsinθrcosθ0001∣=r \frac{\partial(x, y, z)}{\partial(r, \theta, z)}=\left|\begin{array}{ccc} \cos \theta & \sin \theta & 0 \\ -r \sin \theta & r \cos \theta & 0 \\ 0 & 0 & 1 \end{array}\right|=r ∂(r,θ,z)∂(x,y,z)=∣∣∣∣∣∣cosθ−rsinθ0sinθrcosθ0001∣∣∣∣∣∣=r
得到柱面坐标积分公式:
∭Ωf(x,y,z)dV=∭Ωf(rcosθ,rsinθ,z)rdrdθdz \iiint \limits_{\Omega} f(x, y, z) d V=\iiint \limits_{\Omega} f(r \cos \theta, r \sin \theta, z) r d r d \theta d z Ω∭f(x,y,z)dV=Ω∭f(rcosθ,rsinθ,z)rdrdθdz
注意,事实上,在具体计算时,可以用柱线法或截面法得到 DDD ( 或 DzD_zDz ) 的二重积分,再转化为极坐标。
02 柱面坐标的投影法分析
若被积函数含有 x2+y2x^2+y^2x2+y2 或立体 VVV 在 xOyxOyxOy 平面上的投影区域是圆域或者圆域的一部分。
令 { x = rcosθ y = rsinθ z = z\begin{cases}\ x\ =\ r\cos\theta \\ \ y\ =\ r\sin\theta \\ \ z\ =\ \ \ \ z\end{cases}⎩⎪⎨⎪⎧ x = rcosθ y = rsinθ z = z ,称为柱面坐标变换,其本质为平面上的极坐标变换。
下面用投影法推导分析:
设立体V:z1(x,y)⩽z⩽z1(x,y)(x,y)∈σ∭Ωf(x,y,z)dV=∬σ[ ∫z1(x,y)z1(x,y)f(x,y,z)dz ]dxdy对此二重积分进行极坐标变换,所谓的柱面坐标变换,本质就是平面极坐标变换x=rcosθ , y=rsinθ若 σ 为 θ 型区域,则 σ : r1(θ)⩽r⩽r2(θ) α⩽θ⩽β原三重积分=∫αβdθ∫r1(θ)r2(θ)[∫z1(rcosθ,rsinθ)z2(rcosθ,rsinθ)f(rcosθ,rsinθ,z) ] rdr =∫αβdθ∫r1(θ)r2(θ)rdr∫z1(rcosθ,rsinθ)z2(rcosθ,rsinθ)f(rcosθ,rsinθ,z) dz \begin{aligned} & 设立体V:z_1(x,y)\leqslant z\leqslant z_1(x,y)\\ & \quad\quad\quad\quad\quad\quad\quad (x,y)\in\sigma\\ & \iiint \limits_{\Omega} f(x, y, z) d V=\iint \limits_{\sigma} [\ \int _{z_1(x,y)}^{z_1(x,y)}f(x,y,z)dz\ ] dxdy\\ & 对此二重积分进行极坐标变换,\\ & 所谓的柱面坐标变换,本质就是平面极坐标变换\\ & x=r\cos\theta \ , \ y=r\sin\theta\\ & 若\ \sigma\ 为\ \theta\ 型区域,则\ \sigma\ : \ r_1(\theta)\leqslant r\leqslant r_2(\theta)\\ & \quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\ \ \alpha\leqslant\theta\leqslant\beta\\ & 原三重积分=\int _{\alpha}^{\beta}d\theta\int _{r_1(\theta)}^{r_2(\theta)}[\int _{z_1(r\cos\theta,r\sin\theta)}^{z_2(r\cos\theta,r\sin\theta)}f(r\cos\theta,r\sin\theta,z)\ ]\ rdr\\ & \quad\quad\quad\quad\ =\int _{\alpha}^{\beta}d\theta\int _{r_1(\theta)}^{r_2(\theta)}rdr\int _{z_1(r\cos\theta,r\sin\theta)}^{z_2(r\cos\theta,r\sin\theta)}f(r\cos\theta,r\sin\theta,z)\ dz\\ \end{aligned} 设立体V:z1(x,y)⩽z⩽z1(x,y)(x,y)∈σΩ∭f(x,y,z)dV=σ∬[ ∫z1(x,y)z1(x,y)f(x,y,z)dz ]dxdy对此二重积分进行极坐标变换,所谓的柱面坐标变换,本质就是平面极坐标变换x=rcosθ , y=rsinθ若 σ 为 θ 型区域,则 σ : r1(θ)⩽r⩽r2(θ) α⩽θ⩽β原三重积分=∫αβdθ∫r1(θ)r2(θ)[∫z1(rcosθ,rsinθ)z2(rcosθ,rsinθ)f(rcosθ,rsinθ,z) ] rdr =∫αβdθ∫r1(θ)r2(θ)rdr∫z1(r
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1317
1317

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









