





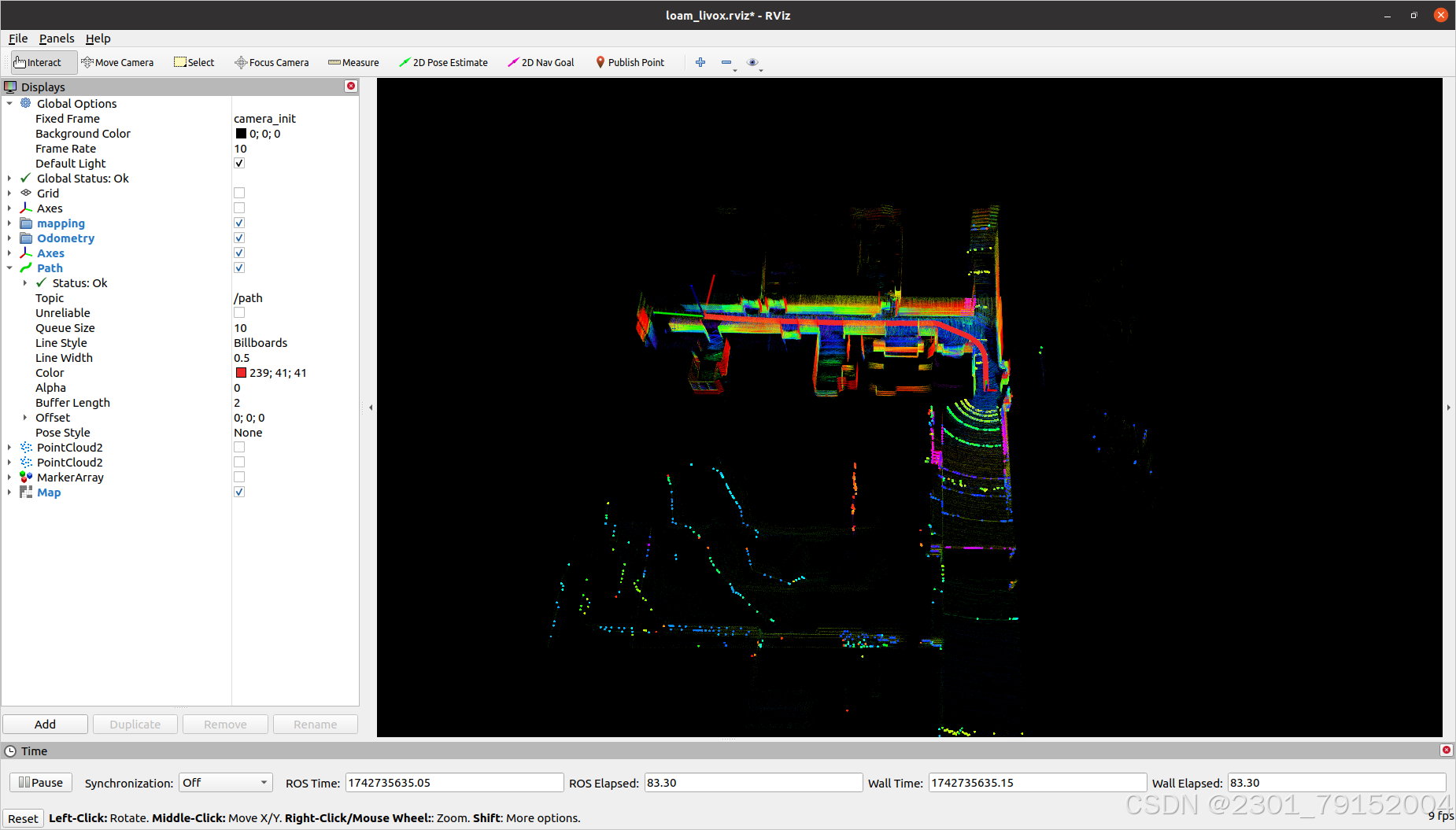
本人用的是镭神C16和xsens imu,由于网上几乎都是关于velodyne的标定,就没有去标定过。前两天录制了一个学校走廊的bag文件,用fast_lio算法跑了一下(直接跑的velodyne的那个launch文件,只修改了激光雷达和IMU的话题),发现效果还不错
然后,今天试着在网上找教程来学学标定,发现标定结果一团糟
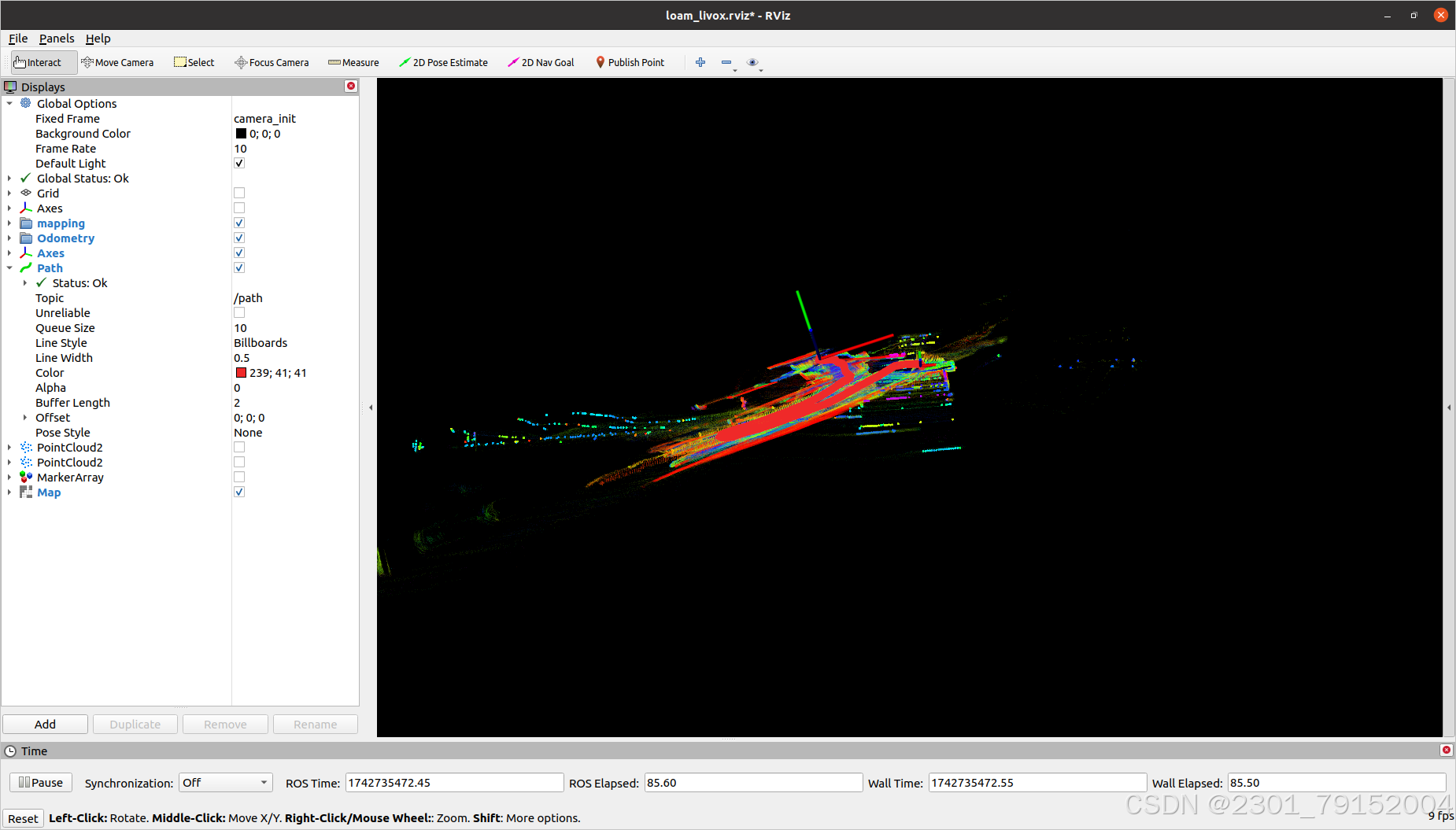
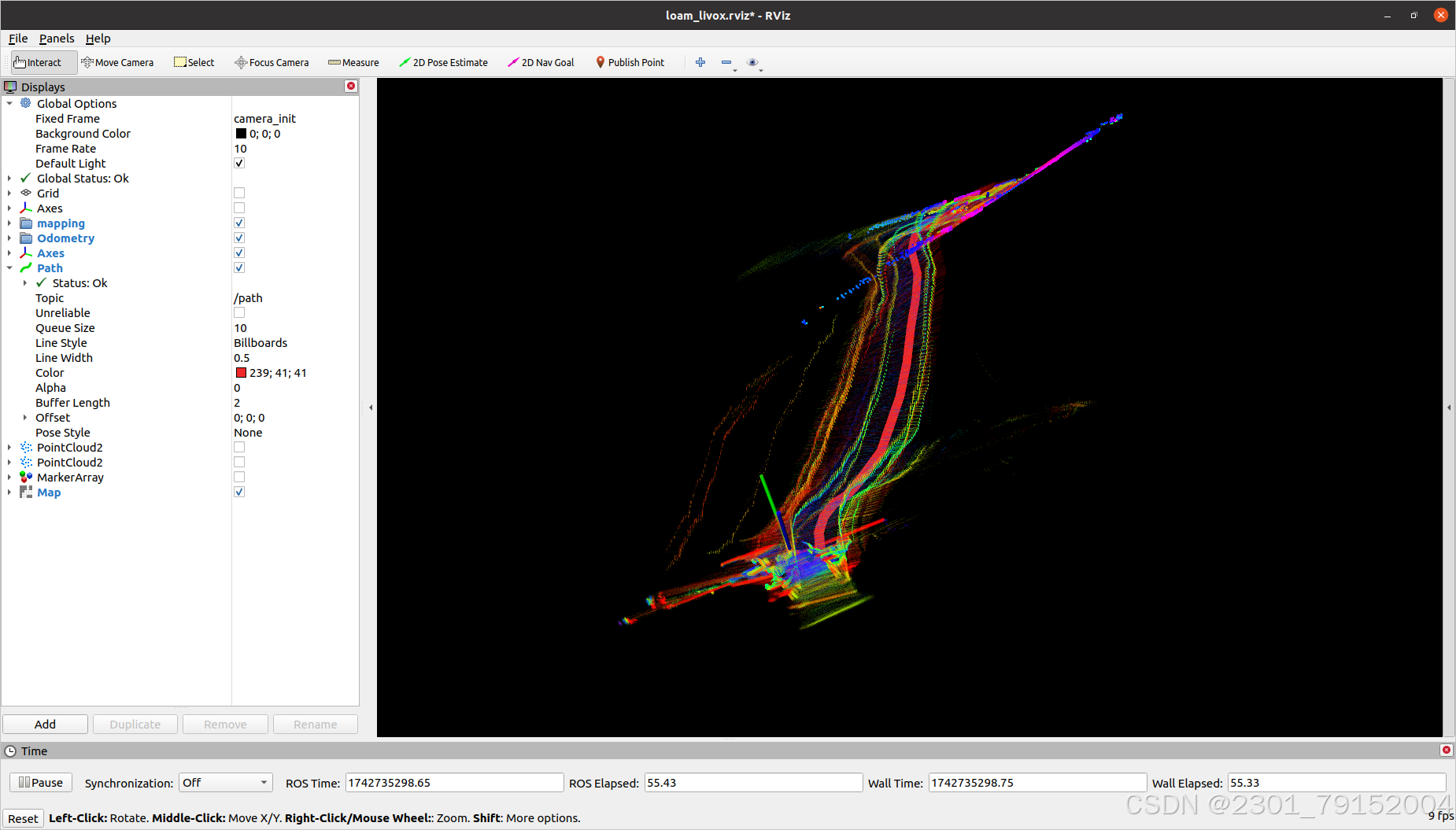
估计还是雷达类型的问题,如果有相同型号雷达要标定的同伴,欢迎一起交流

本人用的是镭神C16和xsens imu,由于网上几乎都是关于velodyne的标定,就没有去标定过。前两天录制了一个学校走廊的bag文件,用fast_lio算法跑了一下(直接跑的velodyne的那个launch文件,只修改了激光雷达和IMU的话题),发现效果还不错
然后,今天试着在网上找教程来学学标定,发现标定结果一团糟
估计还是雷达类型的问题,如果有相同型号雷达要标定的同伴,欢迎一起交流
 711
2000
4572
573
711
2000
4572
573

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























