



调试硬件环境平台:
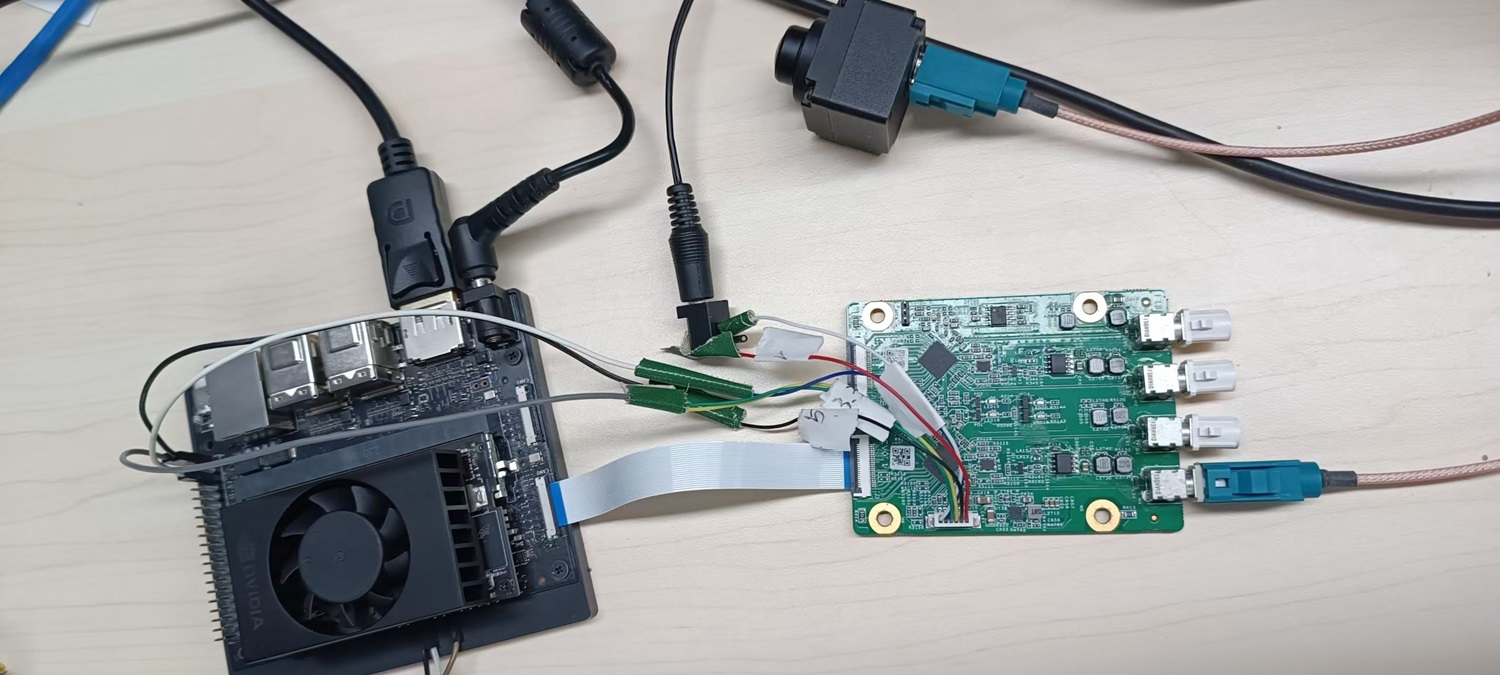
NVIDIA Jetson Orin nano 8G 套件,客户ADI 美信MAX9296 转接板 ,森云智能sensor 模组SG2-IMX390C-5200-G2A-Hxxx;
软件版本: Jetpack5.1.2(L4T 35.4.1), 内容已附上修改源码文件
先吐槽下,前几个月有个客户(不点名集**),老想找我们Jetson 平台调试下 GMSL sensor,之前客户从森云智能采购sensor 模组,拿到手封装的驱动程序,没有能力适配修改。想利用nvidia Jetson代理商这端协助调试驱动方式,最终我们答应,友情协助下,通过分析提供ko驱动文件,在源码上把相关的nvidia和sensor 之间GMSL 链路打通,基本上实现双路GMSL图像输出,知道客户想白嫖的技术态度,把源码交给客户工程师去测试,自行优化算球了。
具体调试细节和过程太多,直接分享参考源码链接下载,仅供调试参考学习和交流,可对比下R35.4.1版本源码,找出修改的差异文件,
源码链接: https://download.youkuaiyun.com/download/zengwj2014/90983903
以上是基于jetpack5.X版本,如果jetpack6.x 版本 ,驱动DTS构架 有部分改动,需要做相关适配才能使用,否则有运行异常,具体问题现象可以交流
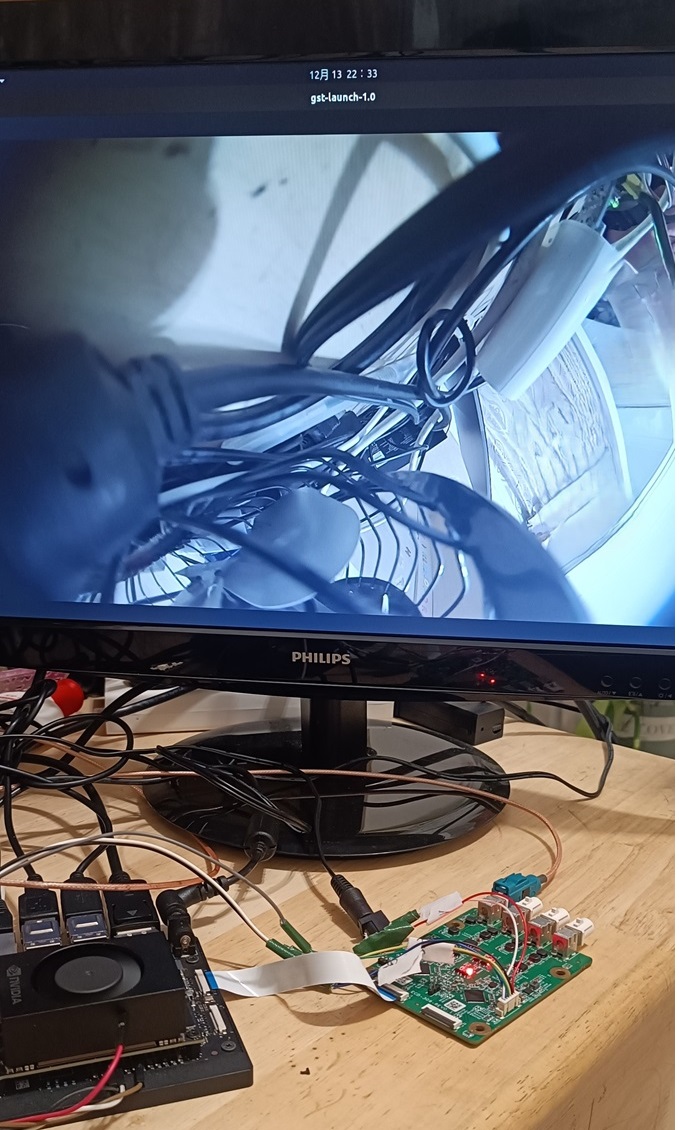
实物图片
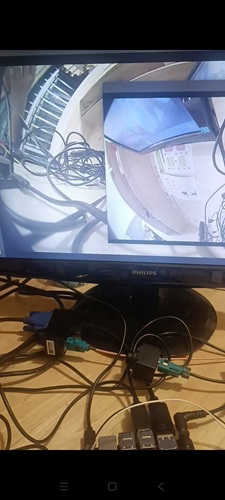
sensor 效果图,这个只接上一个sensor ,实际可以接2路输出
测试指令:
sudo insmod max9295.ko
sudo insmod max9296.ko
sudo insmod nv_imx390.ko
gst-launch-1.0 v4l2src device=/dev/video1 ! xvimagesink -ev
gst-launch-1.0 v4l2src device=/dev/video2 ! xvimagesink -ev
如果有异常时候,执行下面的再来一遍
sudo rmmod -f nv_imx390.ko
sudo rmmod -f max9295.ko
sudo rmmod -f max9296.ko
关于Jetson sensor 和 GMSL 调试,需要学习和理解相关的资料知识
参考学习链接:
2.


















 353
353

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









