




 本文档详细记录了在Ubuntu 18.04操作系统中安装16线激光雷达(rslidar-16)驱动的过程,包括通过git克隆源码、安装数据包捕获库、修改IP地址、解决运行时警告、尝试更新QT版本以及重启电脑。尽管网络ping通,但在rviz中仍未能成功显示点云数据,可能与RVIZ版本或QT相关,但最终未找到确切解决方案。
本文档详细记录了在Ubuntu 18.04操作系统中安装16线激光雷达(rslidar-16)驱动的过程,包括通过git克隆源码、安装数据包捕获库、修改IP地址、解决运行时警告、尝试更新QT版本以及重启电脑。尽管网络ping通,但在rviz中仍未能成功显示点云数据,可能与RVIZ版本或QT相关,但最终未找到确切解决方案。
参考网址:(25条消息) 16线激光雷达rslidar-16的在ubuntu18.04下驱动安装_很快啊,直接就报错了的博客-优快云博客
1、安装雷达驱动
cd ~/catkin_ws/src
git clone https://github.com/RoboSense-LiDAR/ros_rslidar
cd ~/catkin_ws
catkin_make2,安装数据包捕获函数库
sudo apt-get install libpcap-dev
3,更改本机IP地址
将本地IP地址改为192.168.1.102,子网掩码设置为255.255.255.0
雷达默认IP为192.168.1.200.
4,运行代码
cd ~/catkin_ws
source devel/setup.bash
roslaunch rslidar_pointcloud rs_lidar_16.launch5,运行不正常,没有点云数据
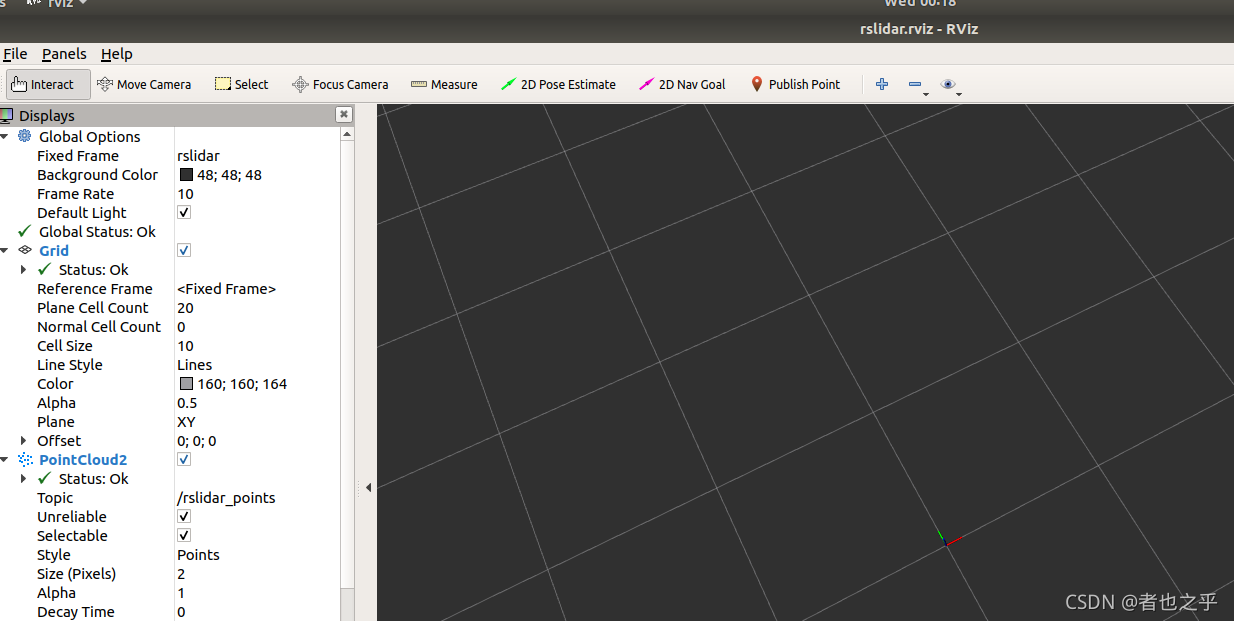
查看有警告信息
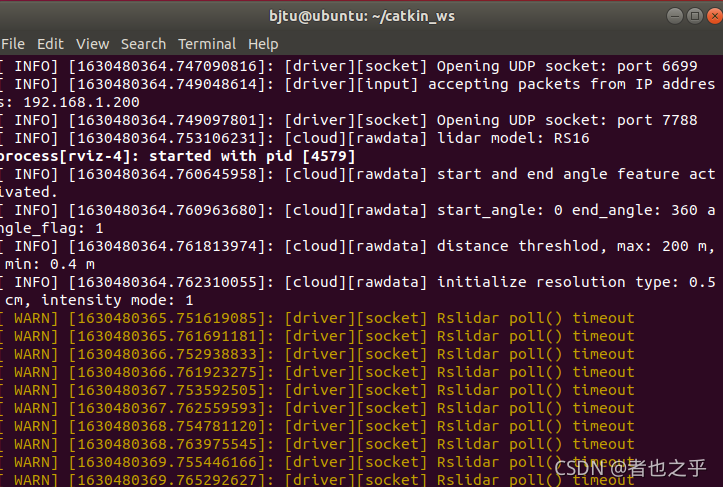
IP设置正常
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3017
3017

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









