




 本文档详细介绍了如何在ROS环境中,利用pointcloud_to_laserscan将Robosense三维激光雷达的点云数据转换为二维扫描,并通过hector_slam进行建图。首先遇到ROS2默认代码问题,解决后成功编译pointcloud_to_laserscan包。接着创建launch文件启动转换节点,最后在rviz中展示了点云和laserscan的可视化效果。
本文档详细介绍了如何在ROS环境中,利用pointcloud_to_laserscan将Robosense三维激光雷达的点云数据转换为二维扫描,并通过hector_slam进行建图。首先遇到ROS2默认代码问题,解决后成功编译pointcloud_to_laserscan包。接着创建launch文件启动转换节点,最后在rviz中展示了点云和laserscan的可视化效果。
利用pointcloud_to_laserscan将robosense三维激光雷达的点云转成二维,采用hector_slam包进行建图。
一、安装pointcloud_to_laserscan包
cd ~/catkin_ws/src
git clone https://github.com/ros-perception/pointcloud_to_laserscan.git
cd ~/catkin_ws
catkin_make第一次编译报错,如下:
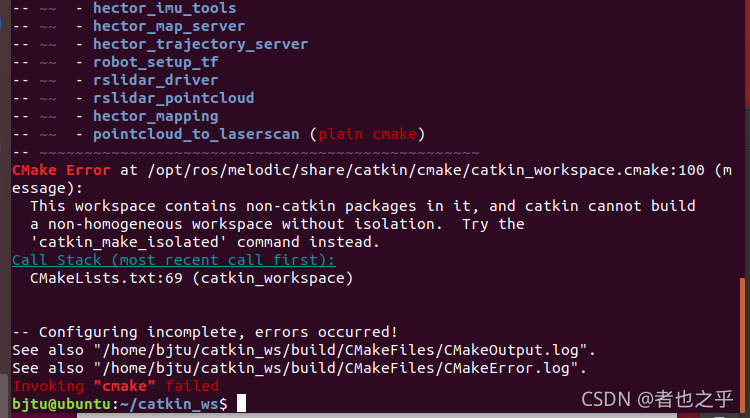
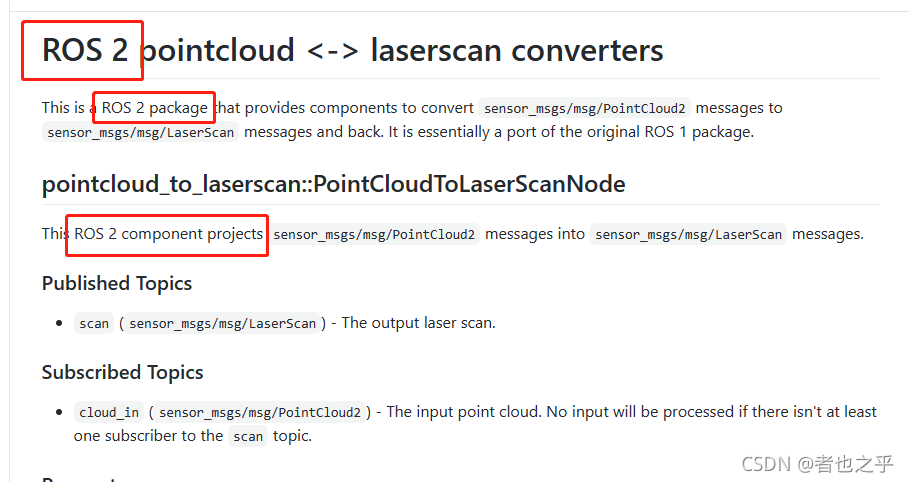
查看源码说明,默认居然是ROS2的代码!不能使用。
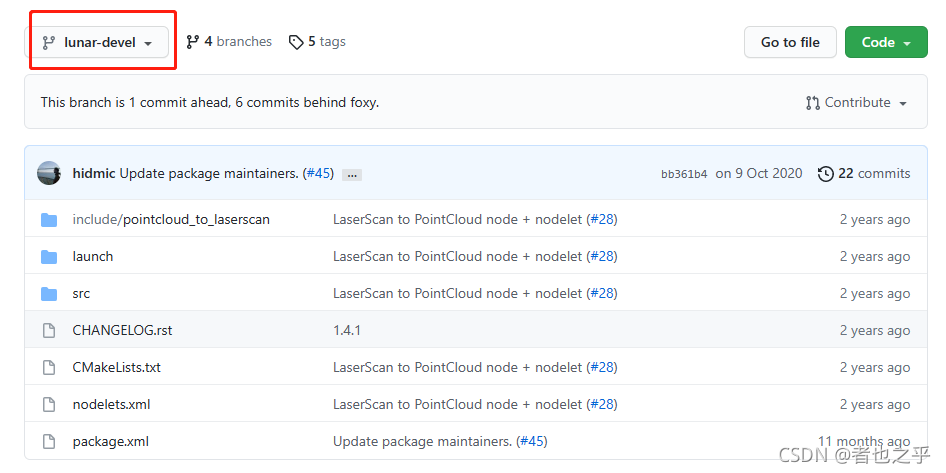
删除gitclone的代码,手动下载lunar版本,解压在src文件夹下。
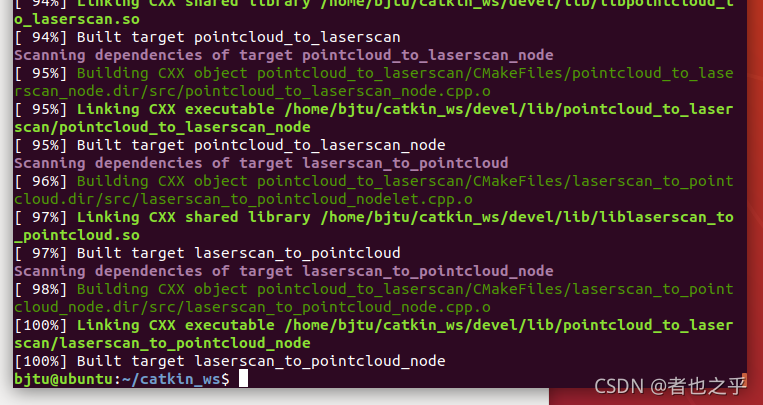
catkin_make编译成功!
二,创建launch文件并运行。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1756
1756

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









