



首先确保能够进行单个无人机仿真再查看官网多机教程。
官网http://dev.px4.io/master/zh/simulation/multi-vehicle-simulation.html中有关于gazebo多机仿真的例子如下:
首先将Firmware文件夹复制到Firmware_clone(自己创建)中,
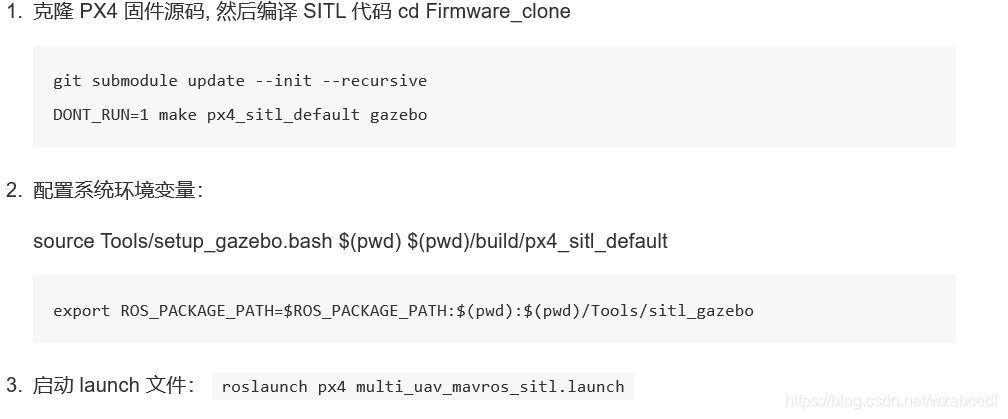
当完全按官网说的进行时,我发现出现了两个gazebo界面,每个界面个一个无人机,实际上我们只需要进行后两步就行了。
执行2,3后,会出现一个gazebo界面和三个或两个无人机,然后就可以进行编程控制了。
多无人机的外部控制与单机一样,不过用的时候和单机有点区别,比如单机的某个节点是/mavros/xxx,多机的时候变成了uav0/mavros/xxx或uav1/mavros/xxx。
gazebo多px4无人机仿真
最新推荐文章于 2025-09-18 19:49:17 发布
 本文详细介绍如何使用PX4和Gazebo进行多无人机仿真,包括环境搭建步骤、常见问题解决及多机控制技巧,适合初学者快速上手。
本文详细介绍如何使用PX4和Gazebo进行多无人机仿真,包括环境搭建步骤、常见问题解决及多机控制技巧,适合初学者快速上手。

















 5838
5838




 到【灌水乐园】发言
到【灌水乐园】发言







