




参考文章:
优快云:px4与gazebo的多无人机编队仿真,offboard模式
PX4官网:Multiple Vehicles with ROS and Gazebo
预备知识:
默认单机模式已经可以起飞,可以参考其他文章,在此不赘述
实现效果:
多机飞行
具体操作:
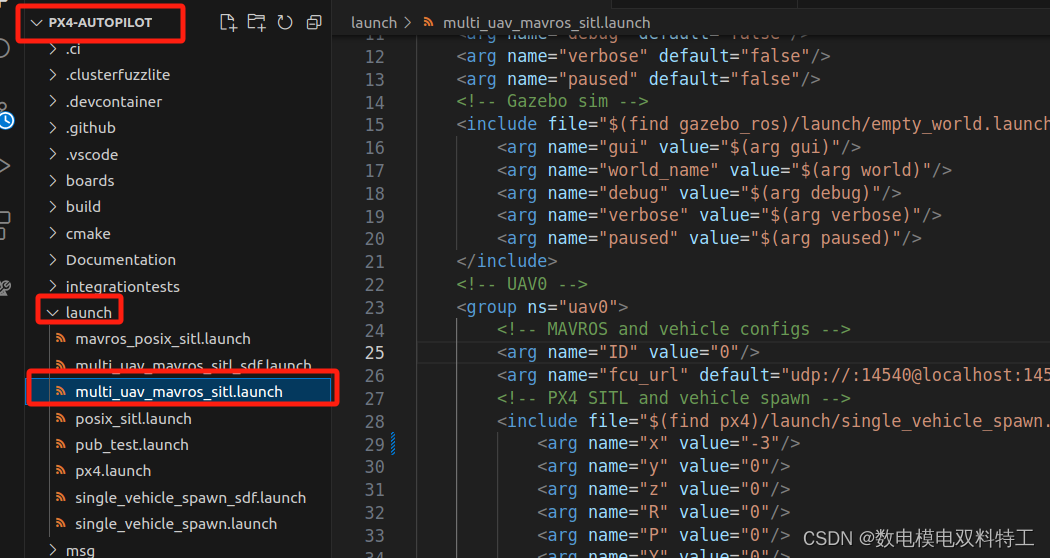
1. 修改lauch文件
打开自己的PX4文件目录launch文件夹里的:“multi_uav_mavros_sitl.launch”文件,这里需要对里边的内容修改。
这里列出来我的四架无人机设置的设置:
<?xml version="1.0"?>
<launch>
<!-- MAVROS posix SITL environment launch script -->
<!-- launches Gazebo environment and 2x: MAVROS, PX4 SITL, and spawns vehicle -->
<!-- vehicle model and world -->
<arg name="est" default="ekf2"/>
<arg name="vehicle" default="iris"/>
<arg name="world" default="$(find mavlink_sitl_gazebo)/worlds/empty.world"/>
<!-- gazebo configs -->
<arg name="gui" default="true"/>
<arg name="debug" default="false"/>
<arg name="verbose" default="false"/>
<arg name="paused" default="false"/>
<!-- Gazebo sim -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="gui" value="$(arg gui)"/>
<arg name="world_name" value="$(arg world)"/>
<arg name="debug" value="$(arg debug)"/>
<arg name="verbose" value="$(arg verbose)"/>
<arg name="paused" value="$(arg paused)"/>
</include>
<!-- UAV0 -->
<group ns="uav0">
<!-- MAVROS and vehicle configs -->
<arg name="ID" value="0"/>
<arg name="fcu_url" default="udp://:14540@localhost:14580"/>
<!-- PX4 SITL and vehicle spawn -->
<include file="$(find px4)/launch/single_vehicle_spawn.launch">
<arg name="x" value="-3"/>
<arg name="y" value="0"/>
<arg name="z" value="0"/>
<arg name="R" value="0"/>
<arg name="P" value="0"/>
<arg name="Y" value="0"/>
<arg name="vehicle" value="$(arg vehicle)"/>
<arg name="mavlink_udp_port" value="14560"/>
<arg name="mavlink_tcp_port" value="4560"/>
<arg name="ID" value="$(arg ID)"/>
<arg name="gst_udp_port" value="$(eval 5600 + arg('ID'))"/>
<arg name="video_uri" value="$(eval 5600 + arg('ID'))"/>
<arg name="mavlink_cam_udp_port" value="$(eval 14530 + arg('ID'))"/>
</include>
<!-- MAVROS -->
<include file="$(find mavros)/launch/px4.launch">
<arg name="fcu_url" value="$(arg fcu_url)"/>
<arg name="gcs_url" value=""/>
<arg name="tgt_system" value="$(eval 1 + arg('ID'))"/>
<arg name="tgt_component" value="1"/>
</include>
</group>
<!-- UAV1 -->
<group ns="uav1">
<!-- MAVROS and vehicle configs -->
<arg name="ID" value="1"/>
<arg name="fcu_url" default="udp://:14541@localhost:14581"/>
<!-- PX4 SITL and vehicle spawn -->
<include file="$(find px4)/ 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1453
1453

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









