







 超级会员免费看
超级会员免费看
 本文分析了轮式平衡机器人的角度、速度和方向控制,采用双闭环PID策略。角度控制通过PD内环实现,速度控制利用PI外环,方向控制用比例控制P。控制框架涉及CD摄像头循迹、APP控制、超声波避障等功能。
本文分析了轮式平衡机器人的角度、速度和方向控制,采用双闭环PID策略。角度控制通过PD内环实现,速度控制利用PI外环,方向控制用比例控制P。控制框架涉及CD摄像头循迹、APP控制、超声波避障等功能。
轮式平衡机器人具有自不稳定性,可类比一级倒立摆系统的控制方法,常见有反馈线性化方法、非线性PID控制、自适应控制、自抗扰控制,还有改进的传统缺乏对外界干扰和参数改变鲁棒性的滑模变结构控制。我们采用较为简单的双闭环PID控制实现平衡模型。
一、角度平衡控制(PD内环)
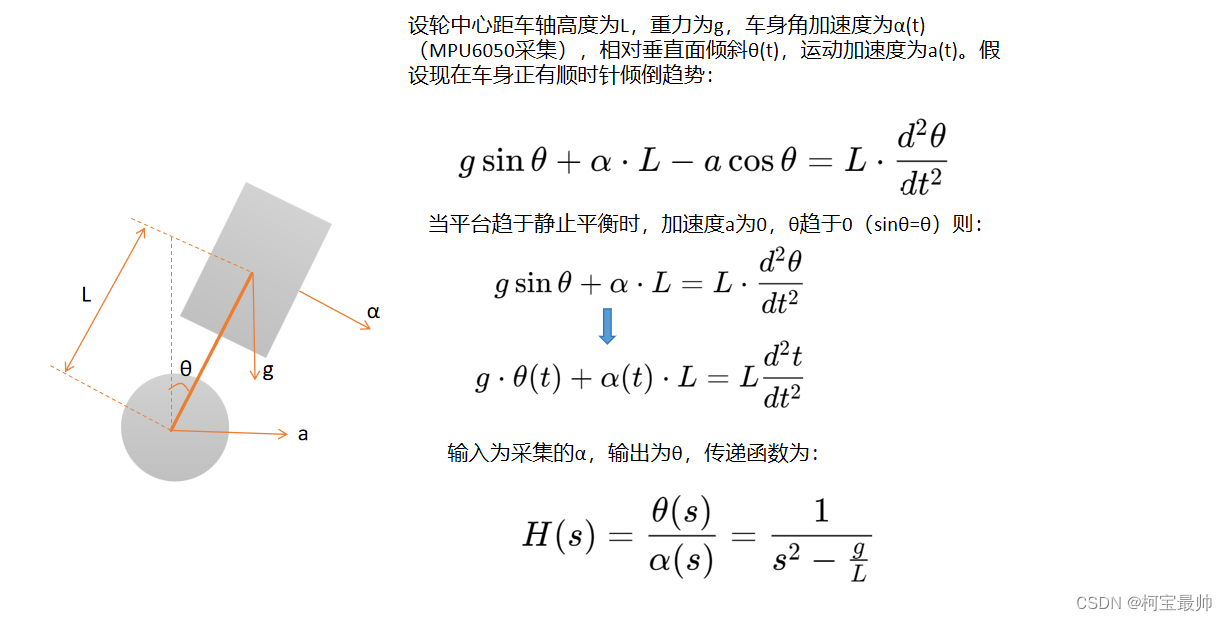

由上面的系统传递函数可知,该系统一共2个极点,但根据奈奎斯特判据,其中一个极点位于s平面的右半面会引起系统的不稳定性,可加入反馈环节消除这种不稳定,能有效避免闭环过程中参数波动产生的
轮式平衡机器人具有自不稳定性,可类比一级倒立摆系统的控制方法,常见有反馈线性化方法、非线性PID控制、自适应控制、自抗扰控制,还有改进的传统缺乏对外界干扰和参数改变鲁棒性的滑模变结构控制。我们采用较为简单的双闭环PID控制实现平衡模型。
由上面的系统传递函数可知,该系统一共2个极点,但根据奈奎斯特判据,其中一个极点位于s平面的右半面会引起系统的不稳定性,可加入反馈环节消除这种不稳定,能有效避免闭环过程中参数波动产生的
 7411
3904
1396
1104
7411
3904
1396
1104

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文


























