







该控制主要构成的控制环包含三部分,第一个是我们的系统,从中我们将测量倾角,此循环的第二部风是求和过程,在这里我们要比较测量角与期望的输出(0度),我们将此错误输入此循环的第三部分,那就是pid控制器,它将给我们适当的力以稳定机器人,现在我们将开始操作
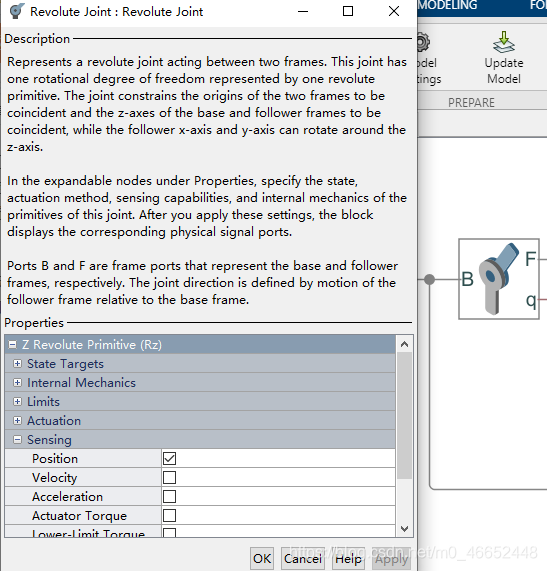
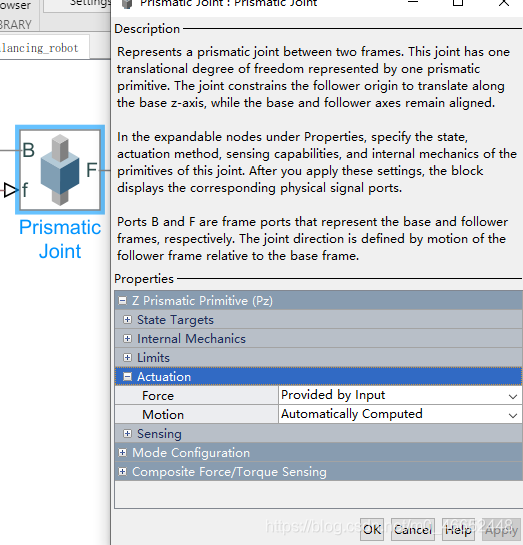
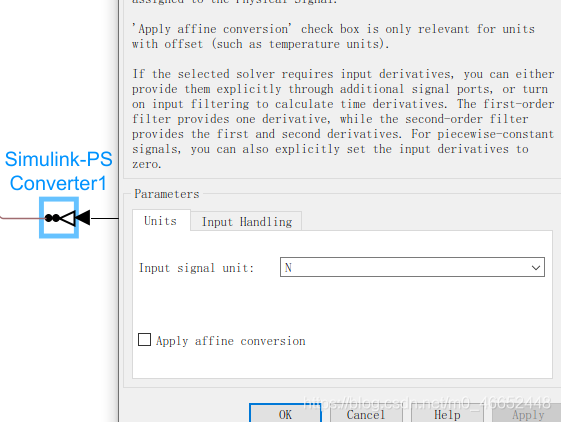
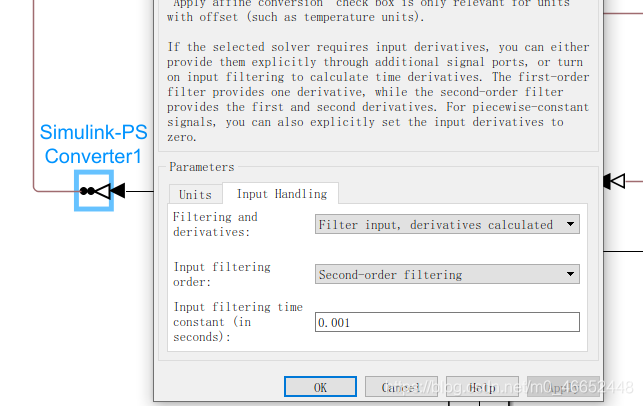
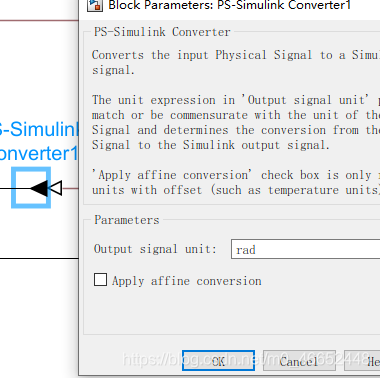
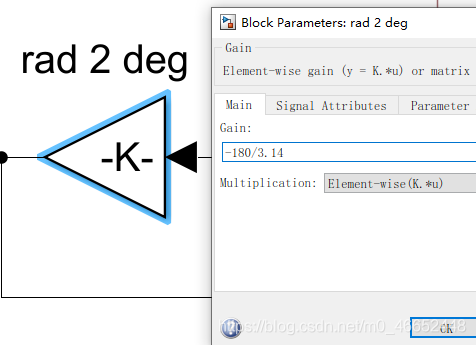
底盘的倾角由旋转关节的位置测量,我们还将通过输入提供棱柱形关节,并自动进行运动的计算,角度以弧度为单位,所以也许您想将其转换成为度数以获得可读性更强的信息,可以通过乘以180来完成
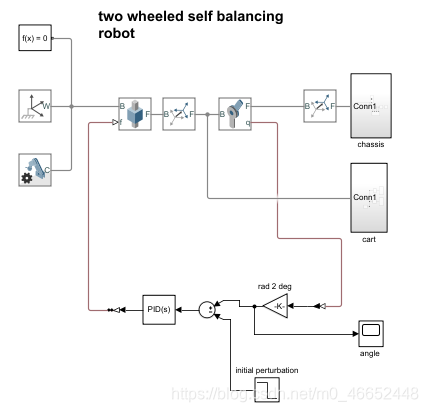
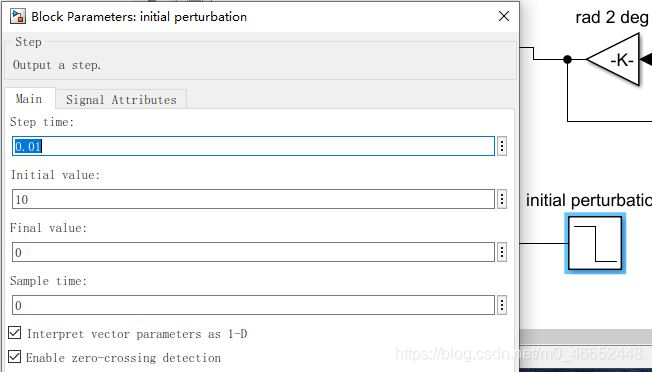
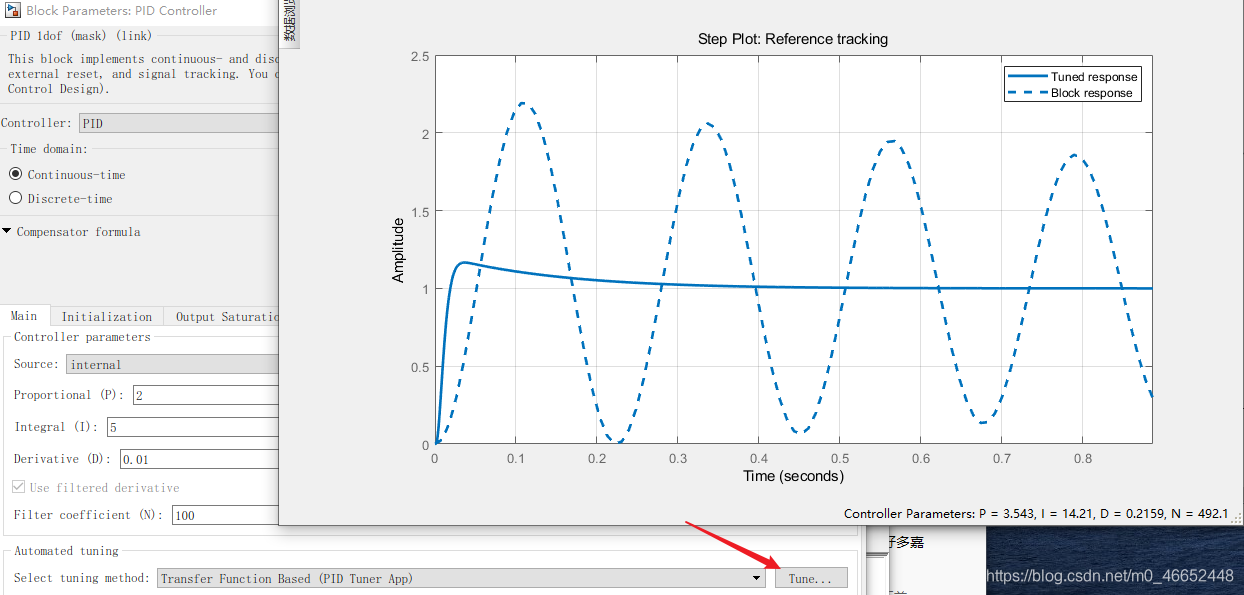
最后一个阶段就是调节PID参数,必须调整以给我们所需的行为,所以我们将消除我们先前施加的外力,然后给机器人一个初始的倾角而不是施加外力,所以我们将输出信号求和,步进信号将只有10度,在0.01秒内。
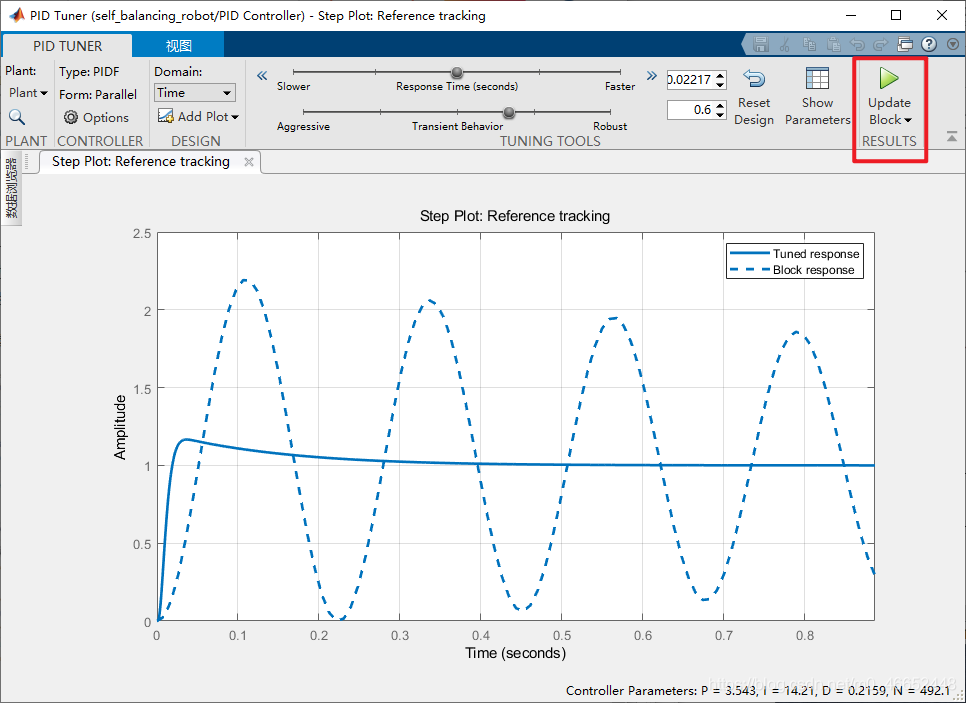
PID参数自动调节
调整后的pid参数
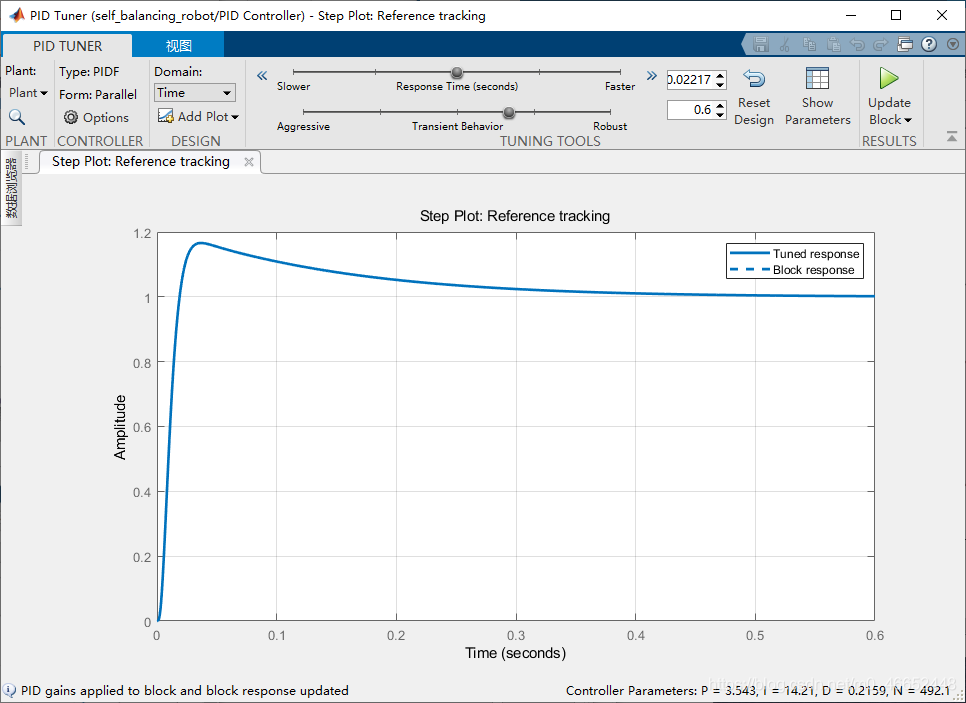
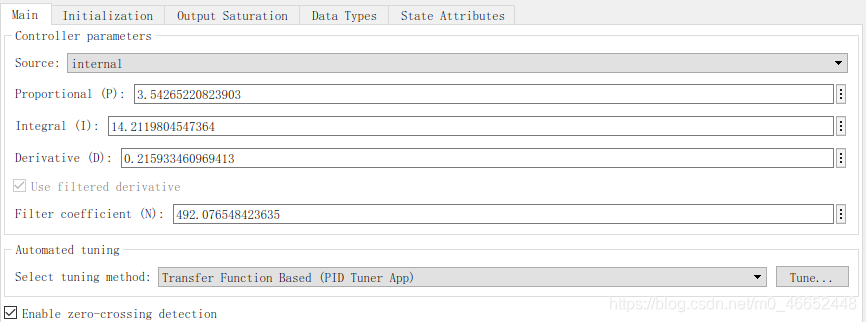
我们可以设置响应的理想属性,自动调谐器会产生适当的pid增益,这使我们可以更好的控制机器人,现在机器人仅靠两个轮子保持平衡,你可以走得更远并增强pid参数。



















 651
651

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











