 轮腿机器人PID控制策略详解
轮腿机器人PID控制策略详解





1 PID介绍
PID(Proportional Integral Derivative)控制系统。其实质是根据输入的偏差值,按比例、积分、微分的函数关系进行运算,运算结果用以输出进行控制。它是在长期的工程实践中总结出来的一套控制方法,实际运行经验和理论分析都表明,对许多工业过程进行控制时,这种方式都能得到比较满意的效果。
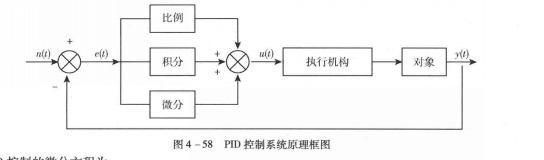

u:输出信号,e: 系统误差信号。Kp比例系数,Ki积分系数,Kd微分系数。
2 腿轮PID整体思路
下面红色箭头形成闭环控制,串联PID,保持平衡并有速度。当静态平衡时,就只需要平衡PID,无需无刷电机和速度PID。

3 旋转PID
只用了比例控制.
Turn.pidout=Turn.Kp*Turn.err;
4 左右轮速度PID
Avelocity.integral += Avelocity.err*0.01;
Avelocity.derivative = (Avelocity.err-Ave
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2917
2917

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











