






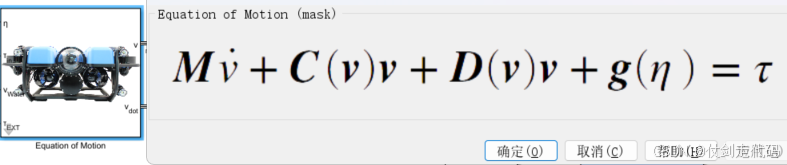
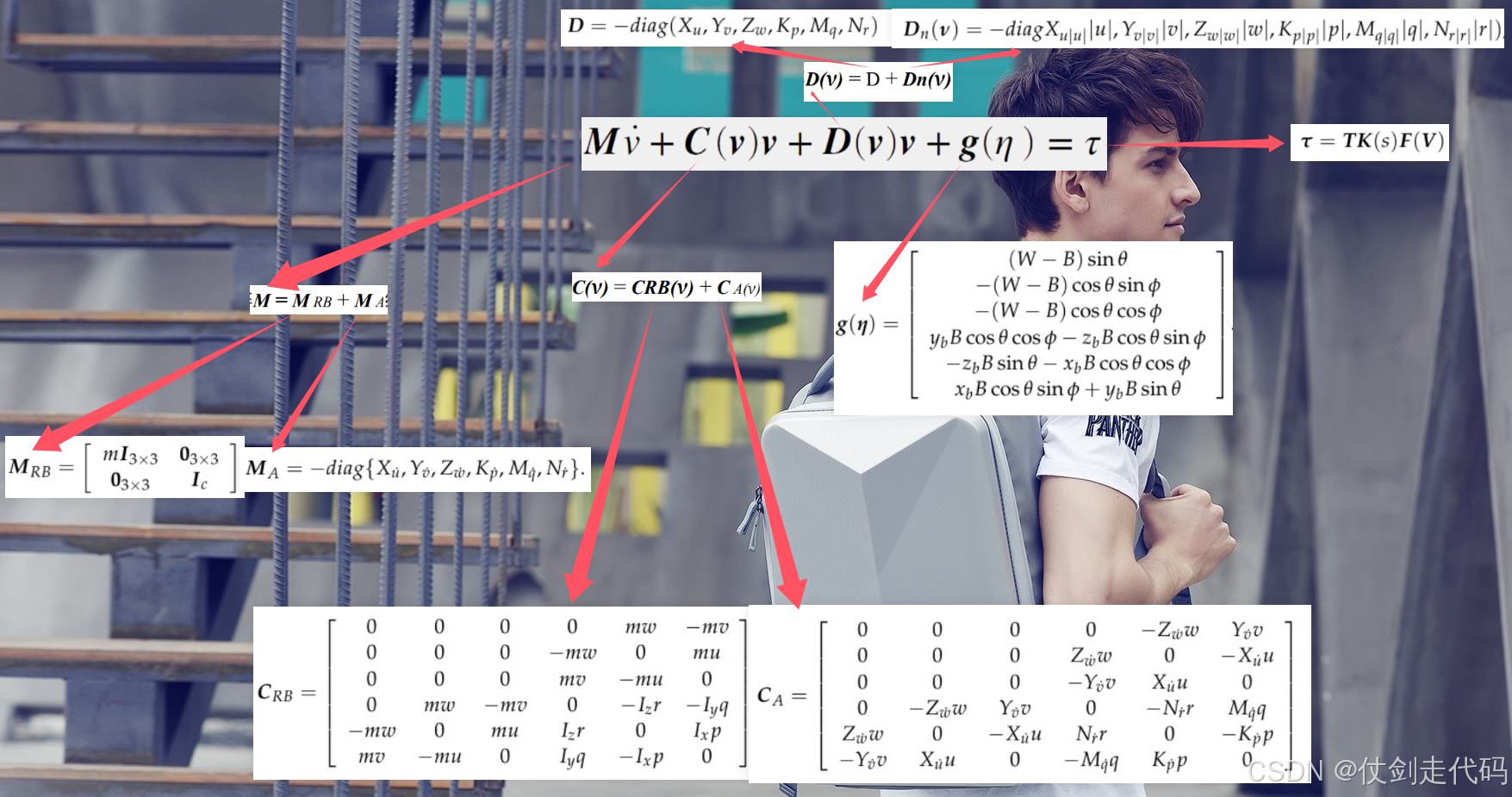
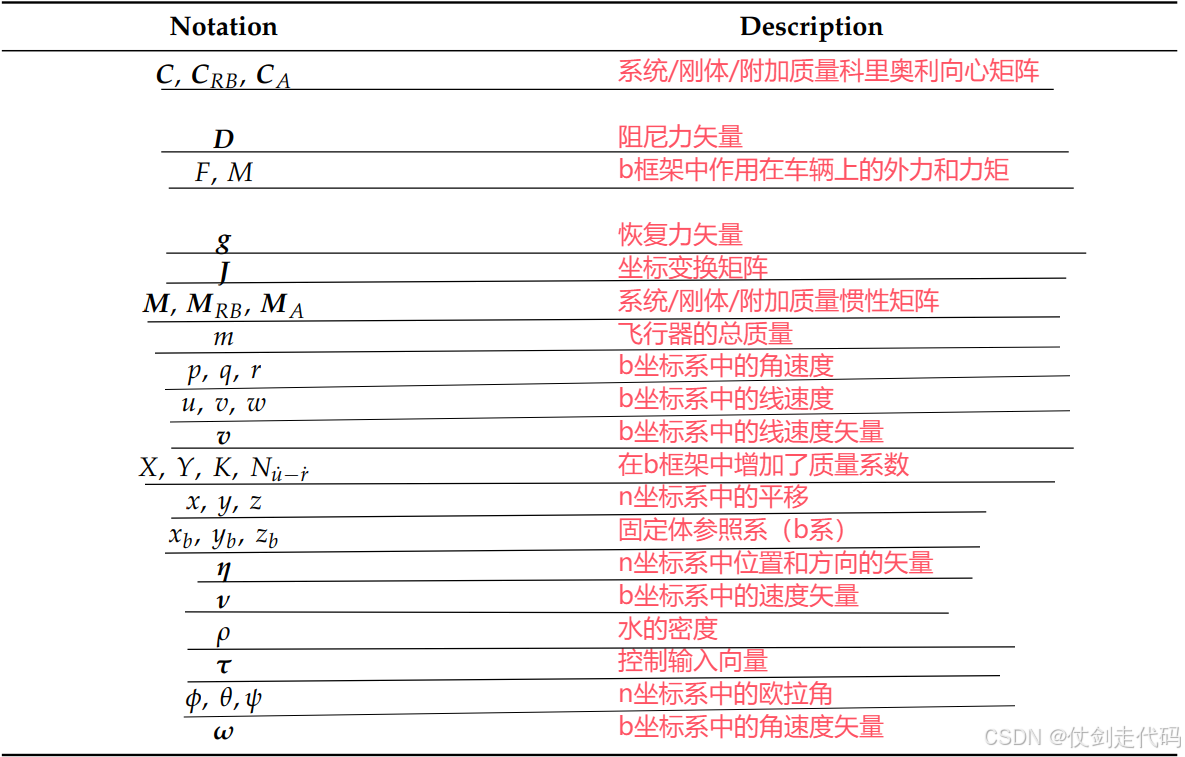
水下机器人模型建立
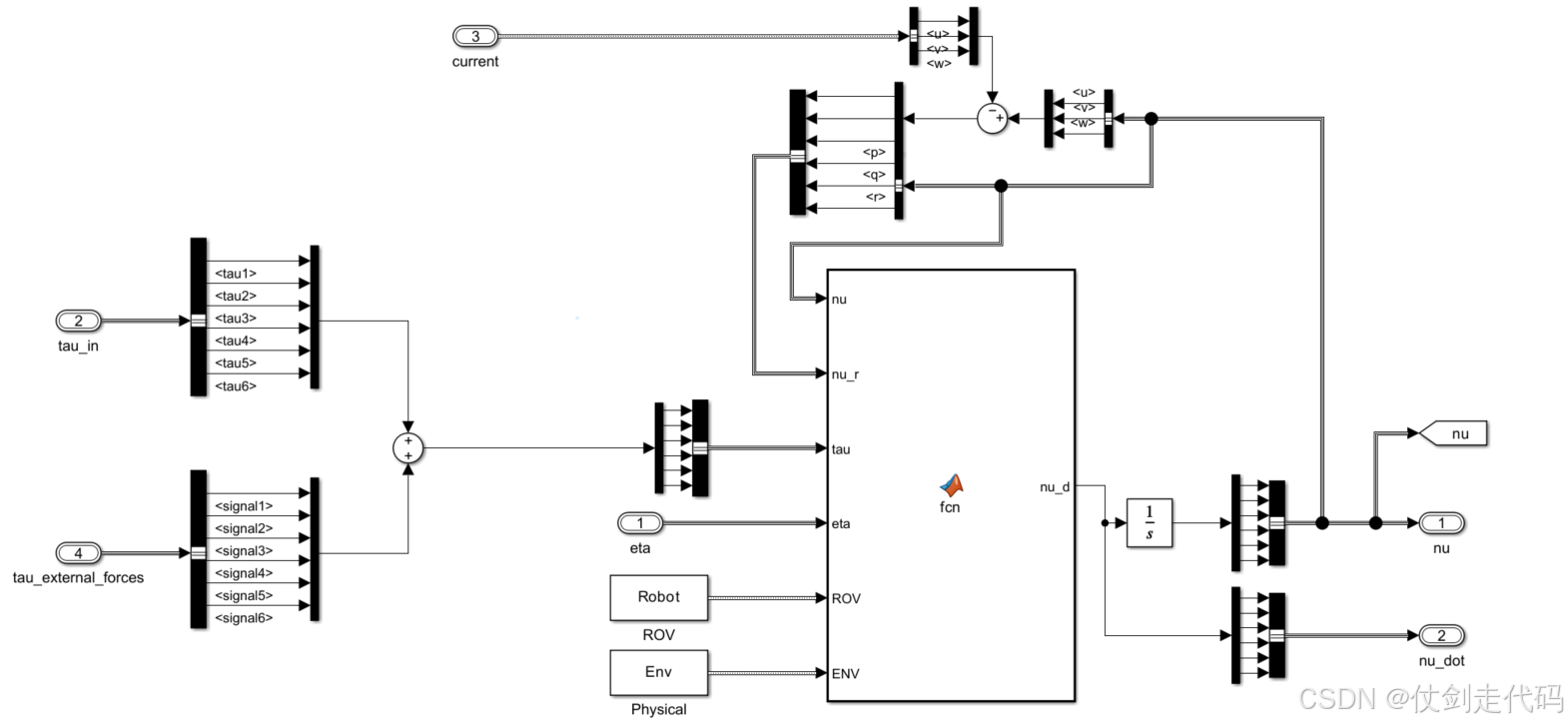
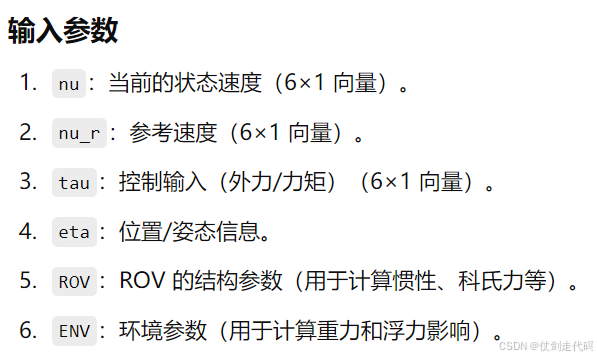
function nu_d = fcn(nu,nu_r,tau,eta,ROV,ENV)
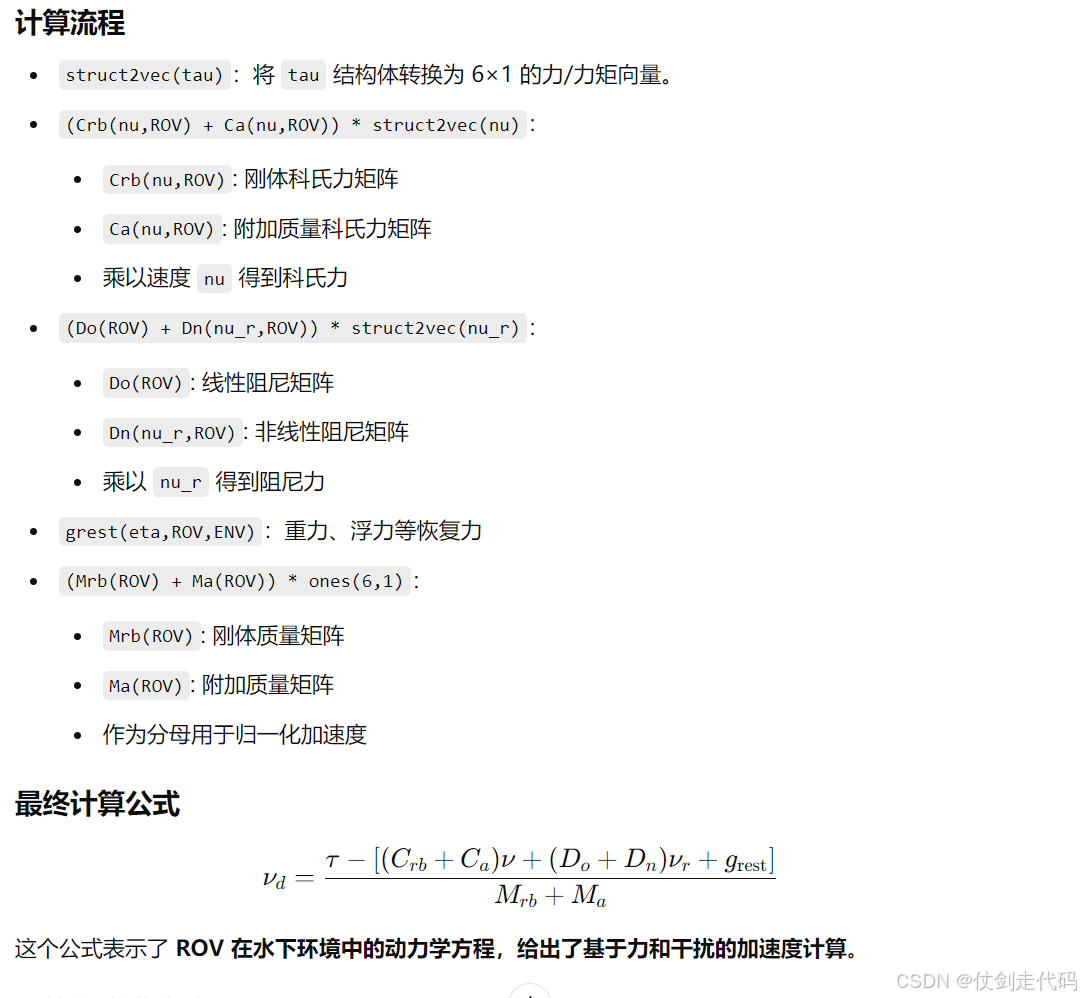
nu_d = (struct2vec(tau)...
-((Crb(nu,ROV)+Ca(nu,ROV))*struct2vec(nu)...
+(Do(ROV)+Dn(nu_r,ROV))*struct2vec(nu_r)...
+grest(eta,ROV,ENV)))./((Mrb(ROV)+Ma(ROV))*ones(6,1));
end fcn 计算了水下机器人(ROV)的加速度 nu_d
 示波器
示波器 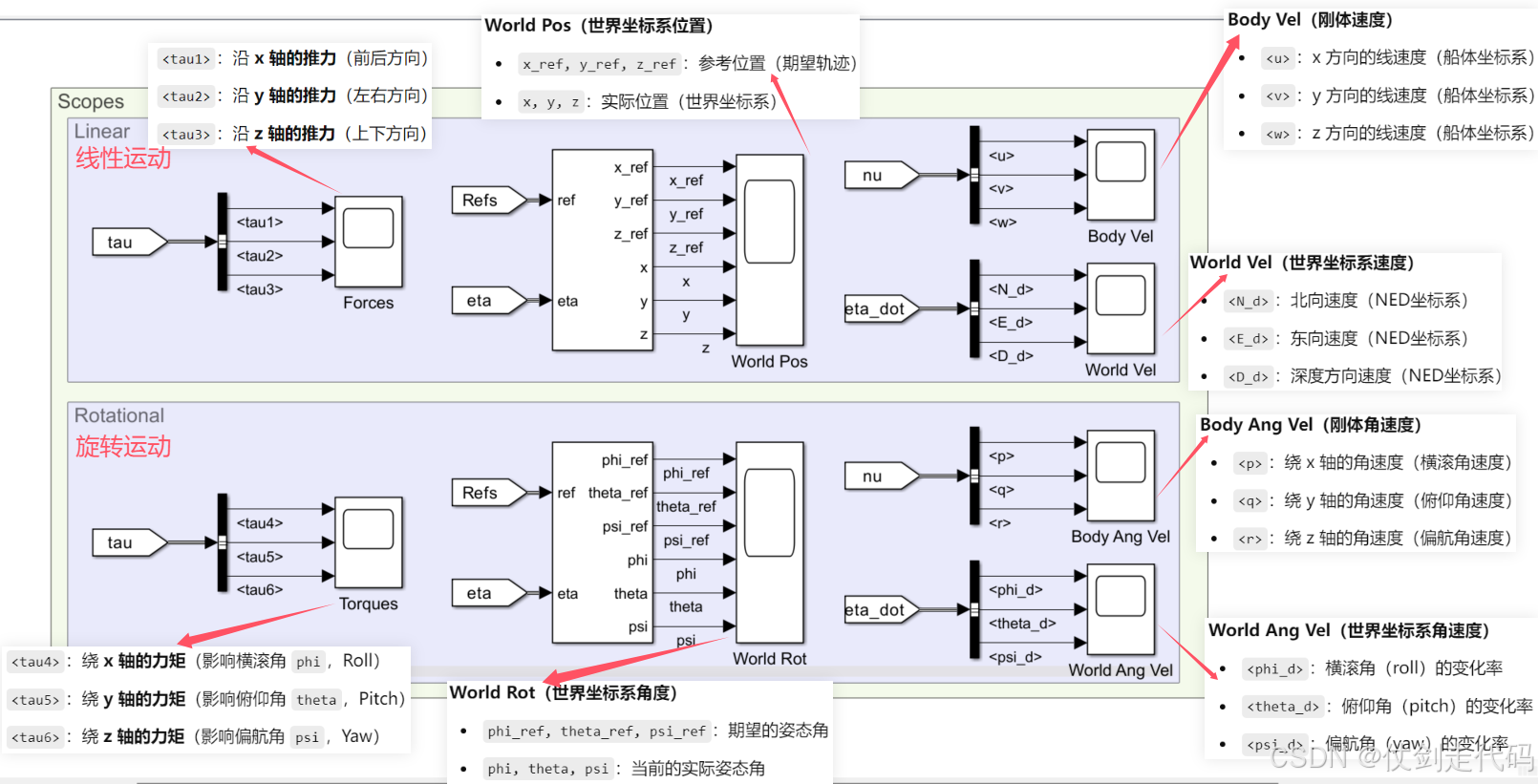
示波器结果
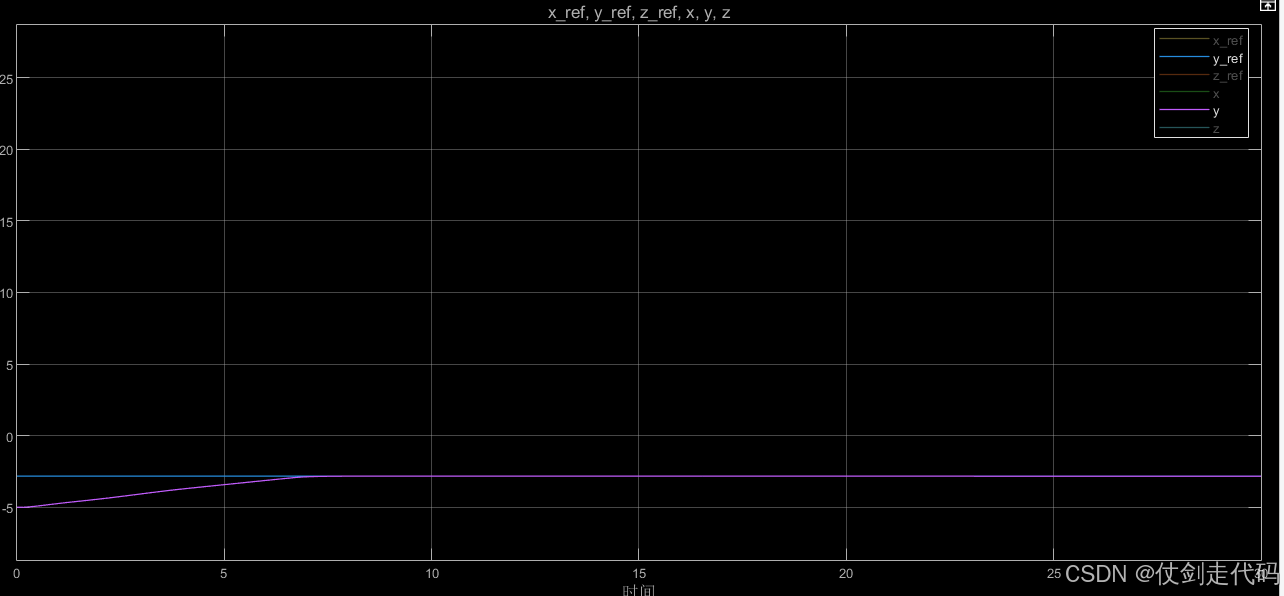
参考x位置和实际X位置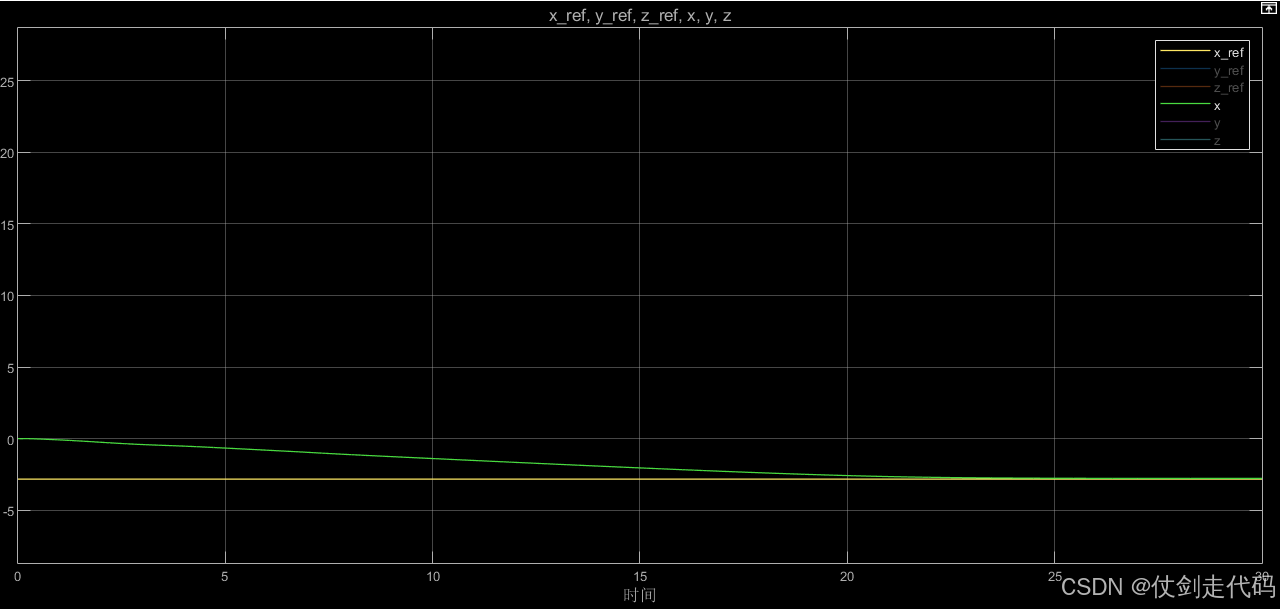
参考Y位置和实际Y位置
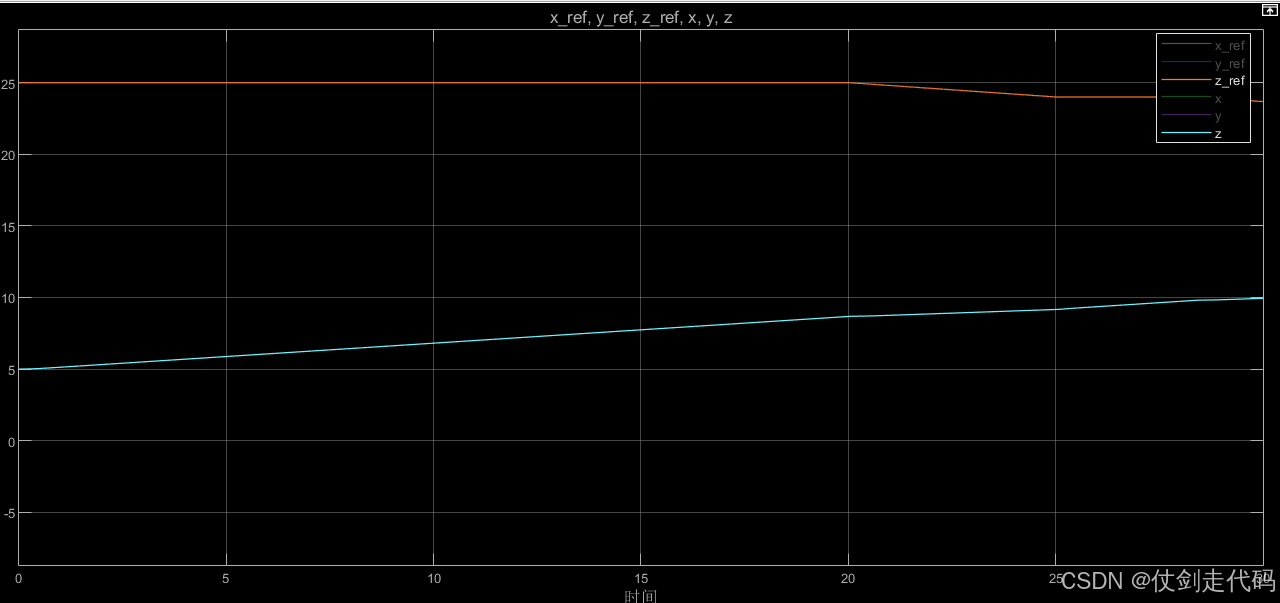
参考Z位置和实际Z位置
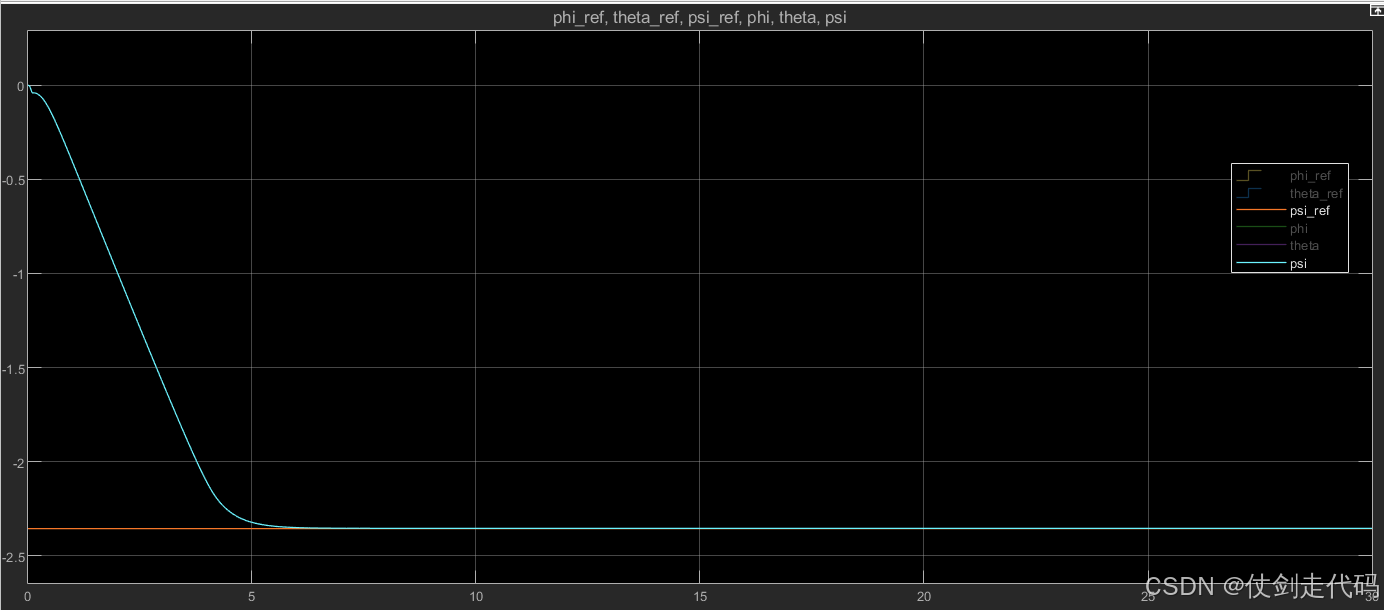
期望横滚俯仰姿态和实际横滚俯仰姿态一致

期望偏航姿态和实际偏航姿态



















 156
156

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











