




 本文详细介绍了在ROS中使用C++和Python实现客户端/服务器模型,包括创建服务包、编写客户端代码(C++和服务调用)、配置编译规则以及Python版本的服务调用示例,展示了如何在/turtlesim环境中控制海龟的spawning。
本文详细介绍了在ROS中使用C++和Python实现客户端/服务器模型,包括创建服务包、编写客户端代码(C++和服务调用)、配置编译规则以及Python版本的服务调用示例,展示了如何在/turtlesim环境中控制海龟的spawning。
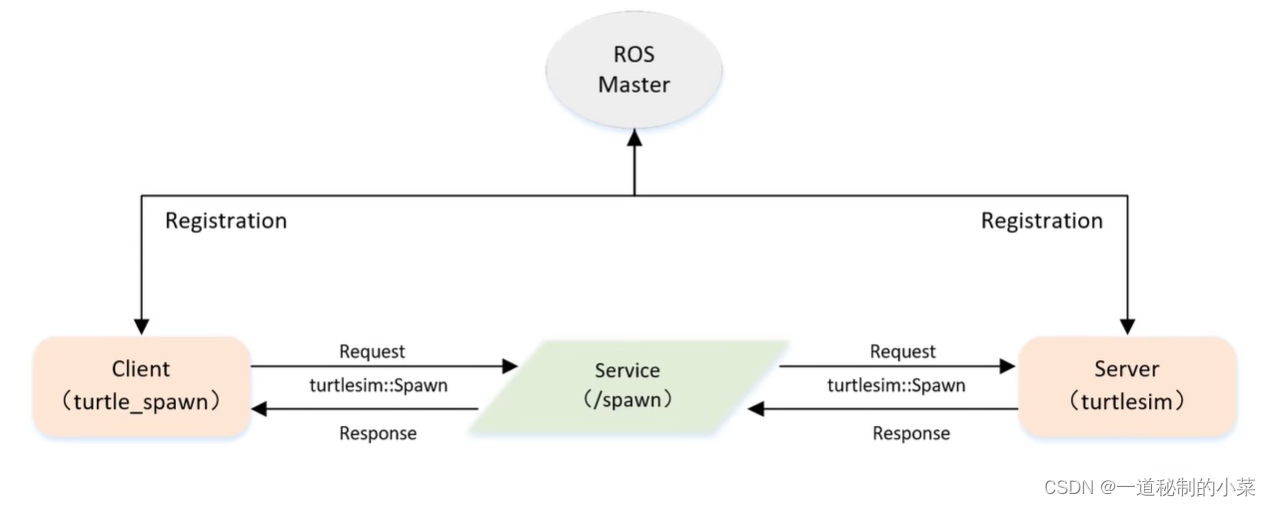
一、服务模型(客户端/服务器)
二、实现步骤
1. 创建功能包
$ cd ~/catkin_ws/src
$ catkin_create_pkg learning_service roscpp rospy std_msgs geometry_msgs turtlesim创建后如下所示:
2. 创建客户端代码(C++)
实现一个客户端
- 初始化ROS节点;
- 创建一个Client实例;
- 发布服务请求数据;
- 等待Sever处理之后的应答结果
创建的C++代码如下:
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************/
/**
* 该例程将请求/spawn服务,服务数据类型turtlesim::Spawn
*/
#include <ros/ros.h>
#include <turtlesim/Spawn.h>
in 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 4359
4359

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











