




 本文详细介绍了如何在ROS(RobotOperatingSystem)中创建自定义话题模型,包括在C++和Python中实现发布者和订阅者,以及在package.xml和CMakeLists.txt中配置编译和依赖。
本文详细介绍了如何在ROS(RobotOperatingSystem)中创建自定义话题模型,包括在C++和Python中实现发布者和订阅者,以及在package.xml和CMakeLists.txt中配置编译和依赖。
目录
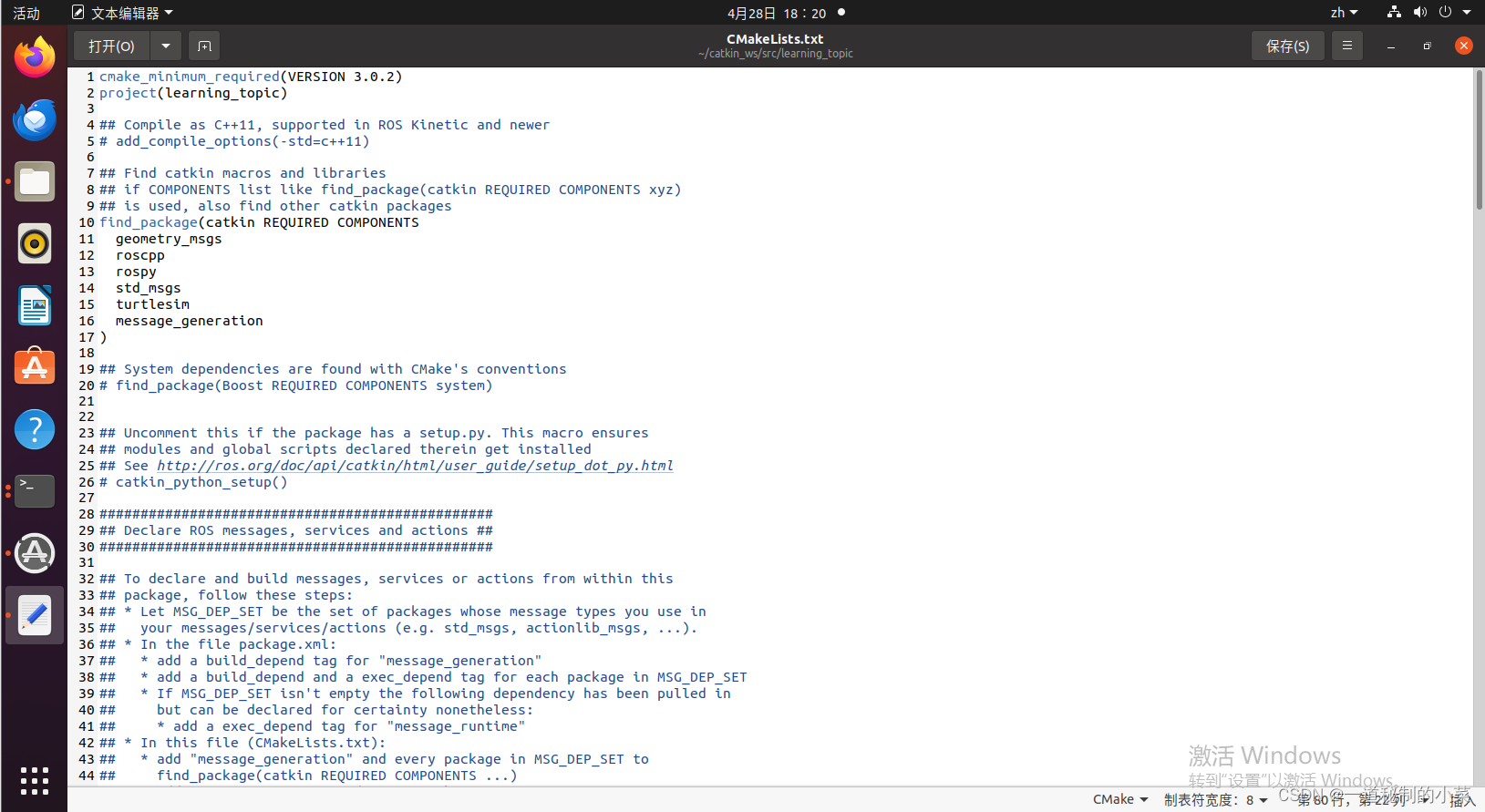
5. 配置CMakeLists.txt中的编译规则(增加发布者和订阅者)
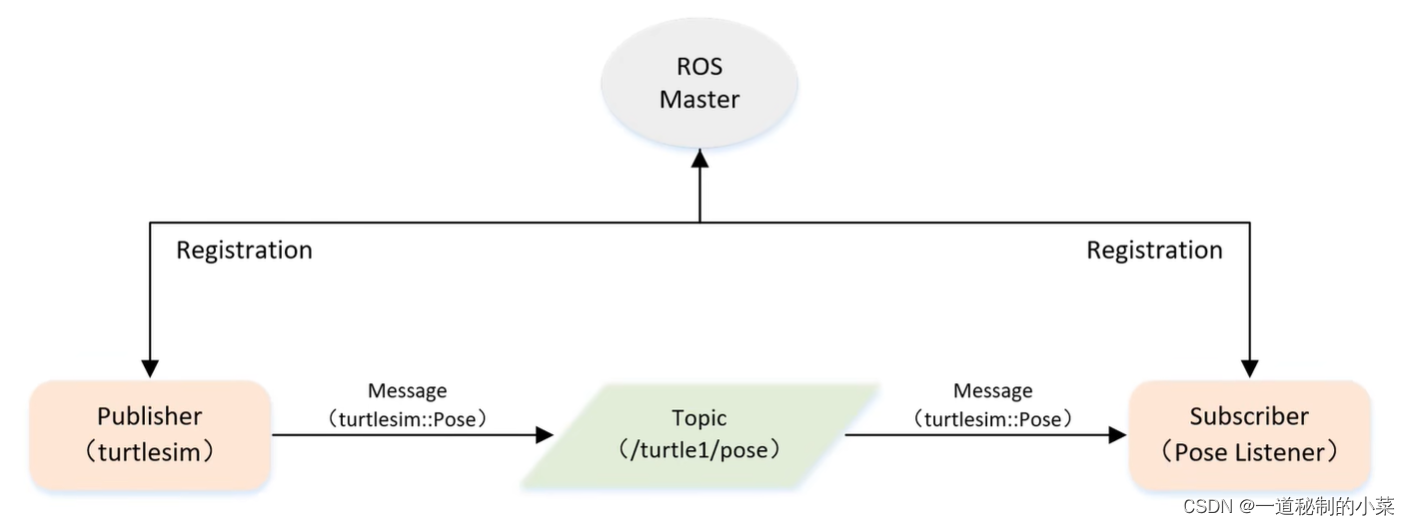
一、话题模型
二、自定义话题消息
- 定义msg文件;
string name
uint8 sex
uint8 age
uint8 unknown = 0
uint8 male = 1
uint8 female = 2
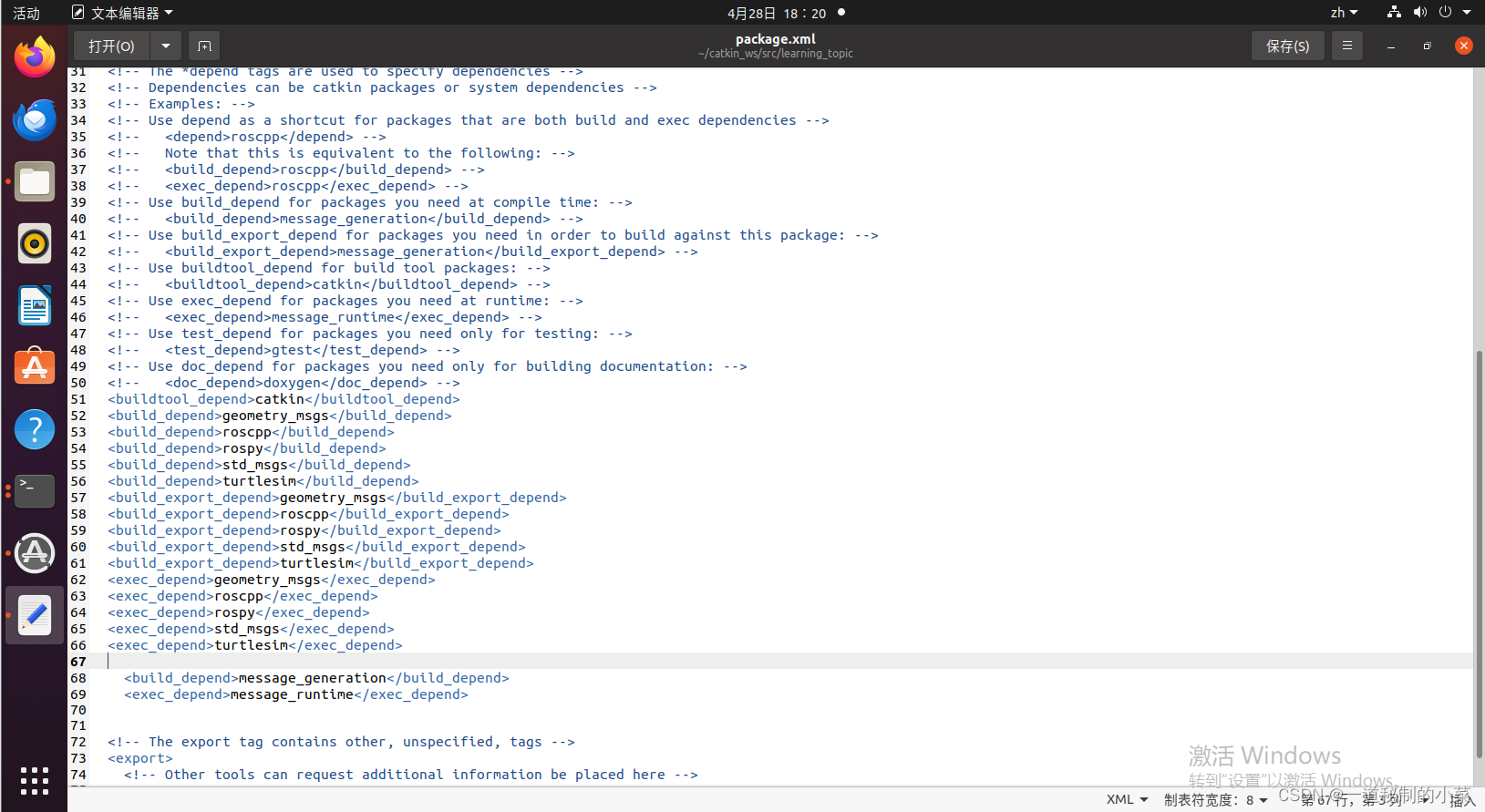
- 在package.xml文件中添加功能包依赖;
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>- 在CMakeLists.txt增加编译选项;
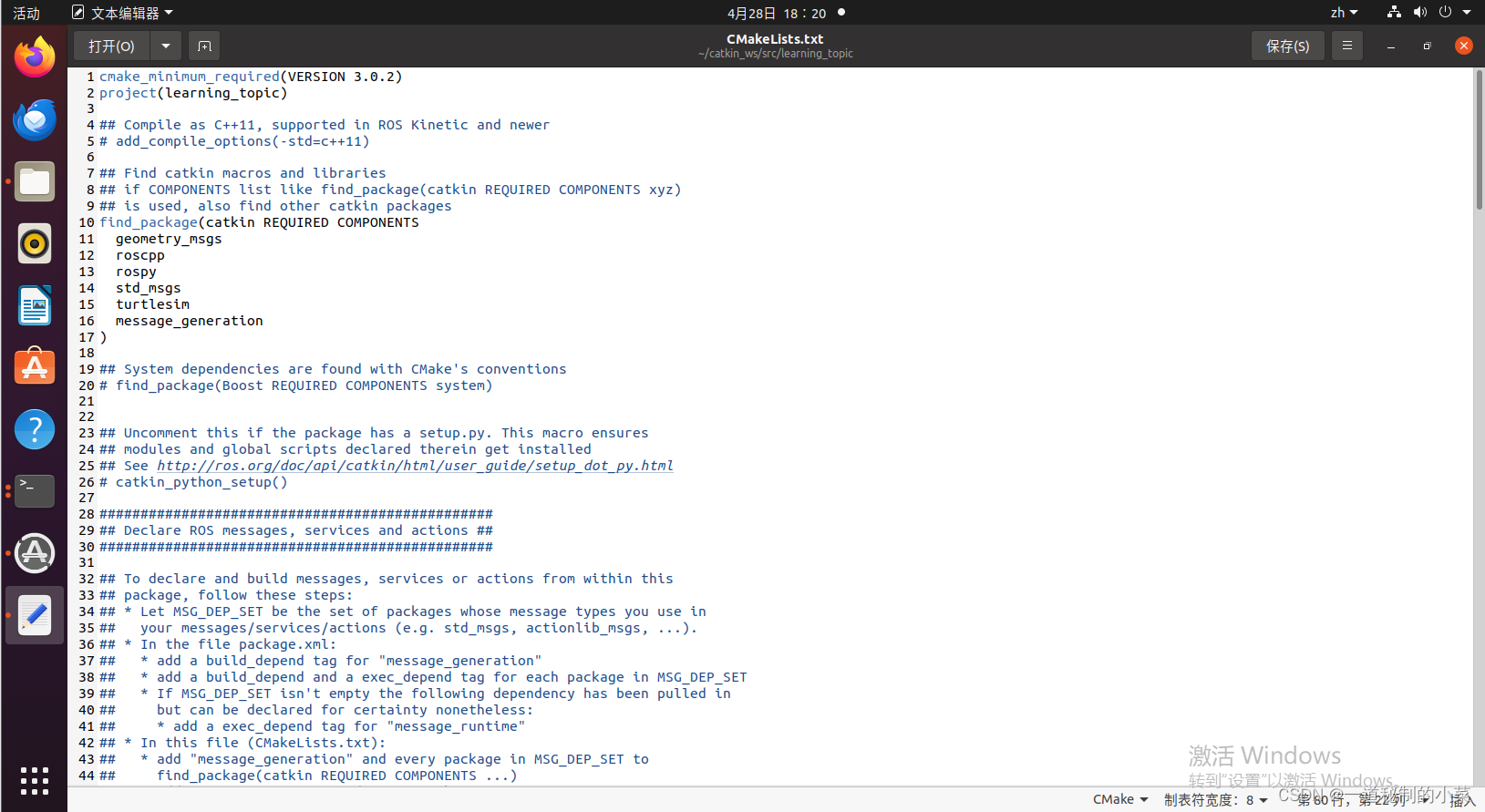
find_package(...... message_generation)
add_message_files(FILES person.msg)
generate_messages(DEPENDENCIES std_msgs)
catkin_package(...... message_runtime)- 编译生成语言相关文件
具体步骤如下:
1. 在功能包下创建msg目录用于存储话题文件
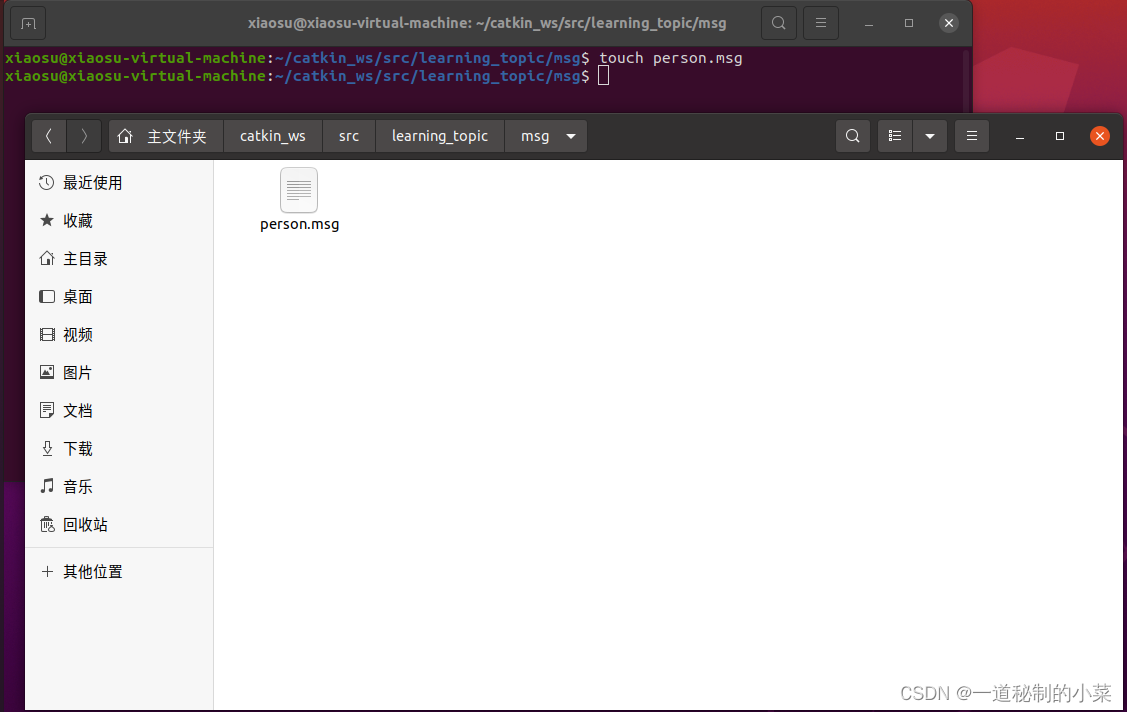
文件内容为上述定义的msg文件。
2. 在package.xml文件中添加功能包依赖;
3. 在CMakeLists.txt增加编译选项;
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 750
750

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











