







拉普拉斯变换和Z变换都是对信号进行数学变换的工具,在连续时间系统和离散时间系统分析中分别起着重要作用,它们之间存在一定的对应关系,具体如下:
从变换目的看对应关系
- 二者都是为了将时域中的信号或系统模型转换到复频域进行分析,这样往往能使分析和计算更加简便。在复频域中,可以通过研究系统函数的极点和零点分布等特性,来判断系统的稳定性、因果性等性能。
从变换定义看对应关系
- 拉普拉斯变换:
对于连续时间函数 f ( t ) f(t) f(t),其拉普拉斯变换定义为
F ( s ) = ∫ 0 ∞ f ( t ) e − s t d t F(s)=\int_{0}^{\infty}f(t)e^{-st}dt F(s)=∫0∞f(t)e−stdt
其中 s = σ + j ω s=\sigma + j\omega s=σ+jω是复变量, σ \sigma σ为实部, ω \omega ω为虚部。 - Z变换:
对于离散时间序列 x ( n ) x(n) x(n),其Z变换定义为
X ( z ) = ∑ n = 0 ∞ x ( n ) z − n X(z)=\sum_{n = 0}^{\infty}x(n)z^{-n} X(z)=n=0∑∞x(n)z−n
其中 z = r e j Ω z = r e^{j\Omega} z=rejΩ是复变量, r r r为模, Ω \Omega Ω为相位。 - 对应关系:
如果把连续时间信号 f ( t ) f(t) f(t)按采样间隔 T s T_s Ts进行离散化,得到离散序列 x ( n ) = f ( n T s ) x(n)=f(nT_s) x(n)=f(nTs),那么可以通过以下对应关系将拉普拉斯域与Z域关联起来:
z = e s T s 或 s = ln z T s z = e^{sT_s} \quad \text{或} \quad s = \frac{\ln z}{T_s} z=esTs或s=Tslnz
从频率域分析看对应关系
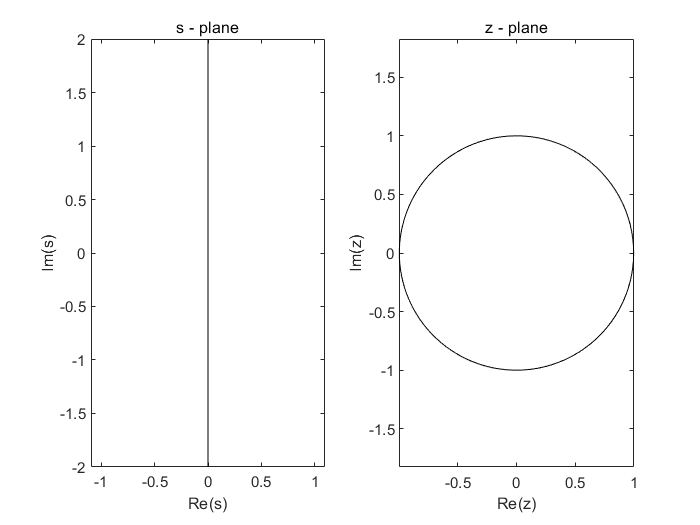
- 拉普拉斯变换将连续时间信号的频率范围映射到复频域
s
s
s平面,而Z变换将离散时间信号的频率范围映射到复频域
z
z
z平面。它们的主要区别在于:
- 拉普拉斯变换的 s s s平面是无限大范围,而Z变换的 z z z平面对应的是一个单位圆及其内部区域。
- 在Z域中,单位圆 ∣ z ∣ = 1 |z|=1 ∣z∣=1对应的是离散信号的归一化频率范围 [ − π , π ] [-\pi, \pi] [−π,π]。
应用对比
- 拉普拉斯变换:主要用于分析连续时间系统,方便计算传递函数、稳态响应等内容。
- Z变换:主要用于分析离散时间系统,尤其在数字信号处理和控制系统的设计中被广泛使用。
以下是一些常用的Z变换和拉普拉斯变换对应的变换结论:
| 连续时间函数 f ( t ) f(t) f(t) | 拉普拉斯变换 F ( s ) F(s) F(s) | Z变换 X ( z ) X(z) X(z) |
|---|---|---|
| 单位阶跃函数 u ( t ) u(t) u(t) | 1 s , Re ( s ) > 0 \frac{1}{s}, \text{Re}(s) > 0 s1,Re(s)>0 | 1 1 − z − 1 , abs ( z ) > 1 \frac{1}{1 - z^{-1}}, \text{abs}(z) > 1 1−z−11,abs(z)>1 |
| 指数函数 e − a t e^{-at} e−at | 1 s + a , Re ( s ) > − a \frac{1}{s + a}, \text{Re}(s) > -a s+a1,Re(s)>−a | 1 1 − a z − 1 , abs ( z ) > abs ( a ) \frac{1}{1 - az^{-1}}, \text{abs}(z) > \text{abs}(a) 1−az−11,abs(z)>abs(a) |
| 正弦函数 sin ( ω t ) \sin(\omega t) sin(ωt) | ω s 2 + ω 2 , Re ( s ) > 0 \frac{\omega}{s^2 + \omega^2}, \text{Re}(s) > 0 s2+ω2ω,Re(s)>0 | z sin ω z 2 − 2 z cos ω + 1 , abs ( z ) > 1 \frac{z \sin\omega}{z^2 - 2z \cos\omega + 1}, \text{abs}(z) > 1 z2−2zcosω+1zsinω,abs(z)>1 |
| 余弦函数 cos ( ω t ) \cos(\omega t) cos(ωt) | s s 2 + ω 2 , Re ( s ) > 0 \frac{s}{s^2 + \omega^2}, \text{Re}(s) > 0 s2+ω2s,Re(s)>0 | z ( z − cos ω ) z 2 − 2 z cos ω + 1 , abs ( z ) > 1 \frac{z(z - \cos\omega)}{z^2 - 2z \cos\omega + 1}, \text{abs}(z) > 1 z2−2zcosω+1z(z−cosω),abs(z)>1 |
| 单位脉冲函数 δ ( t ) \delta(t) δ(t) | 1 1 1 | 1 1 1 |
| t t t | 1 s 2 , Re ( s ) > 0 \frac{1}{s^2}, \text{Re}(s) > 0 s21,Re(s)>0 | z ( z − 1 ) 2 , abs ( z ) > 1 \frac{z}{(z - 1)^2}, \text{abs}(z) > 1 (z−1)2z,abs(z)>1 |
| t n 1 n ! t^n \frac{1}{n!} tnn!1 | 1 s n + 1 , Re ( s ) > 0 \frac{1}{s^{n + 1}}, \text{Re}(s) > 0 sn+11,Re(s)>0 | z m ( z − 1 ) m + 1 , abs ( z ) > 1 \frac{z^m}{(z - 1)^{m + 1}}, \text{abs}(z) > 1 (z−1)m+1zm,abs(z)>1 |
| e − a t sin ( ω t ) e^{-at}\sin(\omega t) e−atsin(ωt) | ω ( s + a ) 2 + ω 2 , Re ( s ) > − a \frac{\omega}{(s + a)^2 + \omega^2}, \text{Re}(s) > -a (s+a)2+ω2ω,Re(s)>−a | a z sin ω z 2 − 2 a z cos ω + a 2 , abs ( z ) > abs ( a ) \frac{az \sin\omega}{z^2 - 2az \cos\omega + a^2}, \text{abs}(z) > \text{abs}(a) z2−2azcosω+a2azsinω,abs(z)>abs(a) |
| e − a t cos ( ω t ) e^{-at}\cos(\omega t) e−atcos(ωt) | s + a ( s + a ) 2 + ω 2 , Re ( s ) > − a \frac{s + a}{(s + a)^2 + \omega^2}, \text{Re}(s) > -a (s+a)2+ω2s+a,Re(s)>−a | z ( z − a cos ω ) z 2 − 2 a z cos ω + a 2 , abs ( z ) > abs ( a ) \frac{z(z - a \cos\omega)}{z^2 - 2az \cos\omega + a^2}, \text{abs}(z) > \text{abs}(a) z2−2azcosω+a2z(z−acosω),abs(z)>abs(a) |
| 连续时间函数 f ( t ) f(t) f(t) | 拉普拉斯变换 F ( s ) F(s) F(s) | Z变换 X ( z ) X(z) X(z) |
|---|---|---|
| t 2 t^2 t2 | 2 s 3 , Re ( s ) > 0 \frac{2}{s^3}, \text{Re}(s) > 0 s32,Re(s)>0 | z ( z + 1 ) ( z − 1 ) 3 , abs ( z ) > 1 \frac{z(z + 1)}{(z - 1)^3}, \text{abs}(z) > 1 (z−1)3z(z+1),abs(z)>1 |
| t 3 t^3 t3 | 6 s 4 , Re ( s ) > 0 \frac{6}{s^4}, \text{Re}(s) > 0 s46,Re(s)>0 | z ( z 2 + 4 z + 1 ) ( z − 1 ) 4 , abs ( z ) > 1 \frac{z(z^2 + 4z + 1)}{(z - 1)^4}, \text{abs}(z) > 1 (z−1)4z(z2+4z+1),abs(z)>1 |
| e a t t e^{at}t eatt | 1 ( s − a ) 2 , Re ( s ) > a \frac{1}{(s - a)^2}, \text{Re}(s) > a (s−a)21,Re(s)>a | a z ( z − a ) 2 , abs ( z ) > abs ( a ) \frac{az}{(z - a)^2}, \text{abs}(z) > \text{abs}(a) (z−a)2az,abs(z)>abs(a) |
| e a t t 2 e^{at}t^2 eatt2 | 2 ( s − a ) 3 , Re ( s ) > a \frac{2}{(s - a)^3}, \text{Re}(s) > a (s−a)32,Re(s)>a | a z ( z + a ) ( z − a ) 3 , abs ( z ) > abs ( a ) \frac{az(z + a)}{(z - a)^3}, \text{abs}(z) > \text{abs}(a) (z−a)3az(z+a),abs(z)>abs(a) |
| sinh ( a t ) \sinh(at) sinh(at) | a s 2 − a 2 , Re ( s ) > abs ( a ) \frac{a}{s^2 - a^2}, \text{Re}(s) > \text{abs}(a) s2−a2a,Re(s)>abs(a) | z sinh ( a ) z 2 − 2 z cosh ( a ) + 1 , abs ( z ) > 1 \frac{z \sinh(a)}{z^2 - 2z \cosh(a) + 1}, \text{abs}(z) > 1 z2−2zcosh(a)+1zsinh(a),abs(z)>1 |
| cosh ( a t ) \cosh(at) cosh(at) | s s 2 − a 2 , Re ( s ) > abs ( a ) \frac{s}{s^2 - a^2}, \text{Re}(s) > \text{abs}(a) s2−a2s,Re(s)>abs(a) | z ( z − cosh ( a ) ) z 2 − 2 z cosh ( a ) + 1 , abs ( z ) > 1 \frac{z(z - \cosh(a))}{z^2 - 2z \cosh(a) + 1}, \text{abs}(z) > 1 z2−2zcosh(a)+1z(z−cosh(a)),abs(z)>1 |
| t e − a t sin ( ω t ) t e^{-at} \sin(\omega t) te−atsin(ωt) | 2 ω ( s + a ) [ ( s + a ) 2 + ω 2 ] 2 , Re ( s ) > − a \frac{2\omega(s + a)}{[(s + a)^2 + \omega^2]^2}, \text{Re}(s) > -a [(s+a)2+ω2]22ω(s+a),Re(s)>−a | a z sin ω ( z 2 − 2 a z cos ω + a 2 ) ( z 2 − 2 a z cos ω + a 2 ) 2 , abs ( z ) > abs ( a ) \frac{az \sin\omega (z^2 - 2az \cos\omega + a^2)}{(z^2 - 2az \cos\omega + a^2)^2}, \text{abs}(z) > \text{abs}(a) (z2−2azcosω+a2)2azsinω(z2−2azcosω+a2),abs(z)>abs(a) |
| t e − a t cos ( ω t ) t e^{-at} \cos(\omega t) te−atcos(ωt) | ( s + a ) 2 − ω 2 [ ( s + a ) 2 + ω 2 ] 2 , Re ( s ) > − a \frac{(s + a)^2 - \omega^2}{[(s + a)^2 + \omega^2]^2}, \text{Re}(s) > -a [(s+a)2+ω2]2(s+a)2−ω2,Re(s)>−a | z ( z 2 − 2 a z cos ω + a 2 ) ( z − a cos ω ) − a z 2 sin 2 ω ( z 2 − 2 a z cos ω + a 2 ) 2 , abs ( z ) > abs ( a ) \frac{z(z^2 - 2az \cos\omega + a^2)(z - a \cos\omega) - az^2 \sin^2\omega}{(z^2 - 2az \cos\omega + a^2)^2}, \text{abs}(z) > \text{abs}(a) (z2−2azcosω+a2)2z(z2−2azcosω+a2)(z−acosω)−az2sin2ω,abs(z)>abs(a) |
要考虑采样时间 T s T_s Ts 后的 Z 变换,需要对原先的连续时间函数进行离散化,通常是通过采样来得到离散时间序列,然后再对这些离散时间序列进行 Z 变换。在考虑采样时间 T s T_s Ts 后,离散化的 Z 变换形式一般是通过替换 s = 1 − z − 1 T s s = \frac{1 - z^{-1}}{T_s} s=Ts1−z−1 来得到的。以下是你提供的函数,修改后的 Z 变换公式考虑了采样时间 T s T_s Ts:
以下是考虑采样时间 T s T_s Ts 后,对上述表格中 Z Z Z 变换部分的修改:
| 连续时间函数 f ( t ) f(t) f(t) | 拉普拉斯变换 F ( s ) F(s) F(s) | Z Z Z 变换 X ( z ) X(z) X(z) |
|---|---|---|
| 单位阶跃函数 u ( t ) u(t) u(t) | 1 s , Re ( s ) > 0 \frac{1}{s}, \text{Re}(s)>0 s1,Re(s)>0 |
1
1
−
z
−
1
,
∣
z
∣
>
1
\frac{1}{1 - z^{-1}}, \vert z\vert > 1
1−z−11,∣z∣>1 单位阶跃函数的 Z Z Z 变换与采样时间 T s T_s Ts 无关,因为采样只是取离散时刻的值,其离散序列 u ( n ) u(n) u(n) 不受 T s T_s Ts 影响。 |
| 指数函数 e − a t e^{-at} e−at | 1 s + a , Re ( s ) > − a \frac{1}{s + a}, \text{Re}(s)>-a s+a1,Re(s)>−a |
1
1
−
e
−
a
T
s
z
−
1
,
∣
z
∣
>
∣
e
−
a
T
s
∣
\frac{1}{1 - e^{-aT_s}z^{-1}}, \vert z\vert > \vert e^{-aT_s}\vert
1−e−aTsz−11,∣z∣>∣e−aTs∣ 连续时间函数 e − a t e^{-at} e−at 采样后变为 e − a n T s e^{-anT_s} e−anTs,在 Z Z Z 变换中用 e − a T s e^{-aT_s} e−aTs 替换原来的 a a a。 |
| 正弦函数 sin ( ω t ) \sin(\omega t) sin(ωt) | ω s 2 + ω 2 , Re ( s ) > 0 \frac{\omega}{s^2+\omega^2}, \text{Re}(s)>0 s2+ω2ω,Re(s)>0 |
z
sin
(
ω
T
s
)
z
2
−
2
z
cos
(
ω
T
s
)
+
1
,
∣
z
∣
>
1
\frac{z\sin(\omega T_s)}{z^2 - 2z\cos(\omega T_s)+1}, \vert z\vert > 1
z2−2zcos(ωTs)+1zsin(ωTs),∣z∣>1 离散序列为 sin ( ω n T s ) \sin(\omega nT_s) sin(ωnTs),将三角函数中的自变量变为 ω T s \omega T_s ωTs。 |
| 余弦函数 cos ( ω t ) \cos(\omega t) cos(ωt) | s s 2 + ω 2 , Re ( s ) > 0 \frac{s}{s^2+\omega^2}, \text{Re}(s)>0 s2+ω2s,Re(s)>0 |
z
(
z
−
cos
(
ω
T
s
)
)
z
2
−
2
z
cos
(
ω
T
s
)
+
1
,
∣
z
∣
>
1
\frac{z(z - \cos(\omega T_s))}{z^2 - 2z\cos(\omega T_s)+1}, \vert z\vert > 1
z2−2zcos(ωTs)+1z(z−cos(ωTs)),∣z∣>1 离散序列为 cos ( ω n T s ) \cos(\omega nT_s) cos(ωnTs),将三角函数中的自变量变为 ω T s \omega T_s ωTs。 |
| 单位脉冲函数 δ ( t ) \delta(t) δ(t) | 1 1 1 |
1
1
1 单位脉冲函数的 Z Z Z 变换与采样时间 T s T_s Ts 无关,其离散序列 δ ( n ) \delta(n) δ(n) 不受 T s T_s Ts 影响。 |
| t t t | 1 s 2 , Re ( s ) > 0 \frac{1}{s^2}, \text{Re}(s)>0 s21,Re(s)>0 |
T
s
z
(
z
−
1
)
2
,
∣
z
∣
>
1
T_s\frac{z}{(z - 1)^2}, \vert z\vert > 1
Ts(z−1)2z,∣z∣>1 离散序列为 n T s nT_s nTs,在原来不考虑 T s T_s Ts 的 Z Z Z 变换基础上乘上 T s T_s Ts。 |
| t n 1 n ! t^n\frac{1}{n!} tnn!1 | 1 s n + 1 , Re ( s ) > 0 \frac{1}{s^{n + 1}}, \text{Re}(s)>0 sn+11,Re(s)>0 |
T
s
n
z
n
(
z
−
1
)
n
+
1
,
∣
z
∣
>
1
T_s^n\frac{z^n}{(z - 1)^{n + 1}}, \vert z\vert > 1
Tsn(z−1)n+1zn,∣z∣>1 离散序列为 ( n T s ) n n ! \frac{(nT_s)^n}{n!} n!(nTs)n,在原来不考虑 T s T_s Ts 的 Z Z Z 变换基础上乘上 T s n T_s^n Tsn。 |
| e − a t sin ( ω t ) e^{-at}\sin(\omega t) e−atsin(ωt) | ω ( s + a ) 2 + ω 2 , Re ( s ) > − a \frac{\omega}{(s + a)^2+\omega^2}, \text{Re}(s)>-a (s+a)2+ω2ω,Re(s)>−a |
e
−
a
T
s
z
sin
(
ω
T
s
)
z
2
−
2
e
−
a
T
s
z
cos
(
ω
T
s
)
+
e
−
2
a
T
s
,
∣
z
∣
>
∣
e
−
a
T
s
∣
\frac{e^{-aT_s}z\sin(\omega T_s)}{z^2 - 2e^{-aT_s}z\cos(\omega T_s)+e^{-2aT_s}}, \vert z\vert > \vert e^{-aT_s}\vert
z2−2e−aTszcos(ωTs)+e−2aTse−aTszsin(ωTs),∣z∣>∣e−aTs∣ 离散序列为 e − a n T s sin ( ω n T s ) e^{-anT_s}\sin(\omega nT_s) e−anTssin(ωnTs),用 e − a T s e^{-aT_s} e−aTs 替换 a a a,并将三角函数自变量变为 ω T s \omega T_s ωTs。 |
| e − a t cos ( ω t ) e^{-at}\cos(\omega t) e−atcos(ωt) | s + a ( s + a ) 2 + ω 2 , Re ( s ) > − a \frac{s + a}{(s + a)^2+\omega^2}, \text{Re}(s)>-a (s+a)2+ω2s+a,Re(s)>−a |
z
(
z
−
e
−
a
T
s
cos
(
ω
T
s
)
)
z
2
−
2
e
−
a
T
s
z
cos
(
ω
T
s
)
+
e
−
2
a
T
s
,
∣
z
∣
>
∣
e
−
a
T
s
∣
\frac{z(z - e^{-aT_s}\cos(\omega T_s))}{z^2 - 2e^{-aT_s}z\cos(\omega T_s)+e^{-2aT_s}}, \vert z\vert > \vert e^{-aT_s}\vert
z2−2e−aTszcos(ωTs)+e−2aTsz(z−e−aTscos(ωTs)),∣z∣>∣e−aTs∣ 离散序列为 e − a n T s cos ( ω n T s ) e^{-anT_s}\cos(\omega nT_s) e−anTscos(ωnTs),用 e − a T s e^{-aT_s} e−aTs 替换 a a a,并将三角函数自变量变为 ω T s \omega T_s ωTs。 |
| 连续时间函数 f ( t ) f(t) f(t) | 拉普拉斯变换 F ( s ) F(s) F(s) | Z变换 X ( z ) X(z) X(z)(考虑采样时间 T s T_s Ts) |
|---|---|---|
| t 2 t^2 t2 | 2 s 3 , Re ( s ) > 0 \frac{2}{s^3}, \text{Re}(s) > 0 s32,Re(s)>0 | T s 2 z ( z + 1 ) ( z − 1 ) 3 , abs ( z ) > 1 \frac{T_s^2 z (z + 1)}{(z - 1)^3}, \text{abs}(z) > 1 (z−1)3Ts2z(z+1),abs(z)>1 |
| t 3 t^3 t3 | 6 s 4 , Re ( s ) > 0 \frac{6}{s^4}, \text{Re}(s) > 0 s46,Re(s)>0 | T s 3 z ( z 2 + 4 z + 1 ) ( z − 1 ) 4 , abs ( z ) > 1 \frac{T_s^3 z (z^2 + 4z + 1)}{(z - 1)^4}, \text{abs}(z) > 1 (z−1)4Ts3z(z2+4z+1),abs(z)>1 |
| e a t t e^{at}t eatt | 1 ( s − a ) 2 , Re ( s ) > a \frac{1}{(s - a)^2}, \text{Re}(s) > a (s−a)21,Re(s)>a | a T s z ( z − e a T s ) 2 , abs ( z ) > abs ( e a T s ) \frac{aT_s z}{(z - e^{a T_s})^2}, \text{abs}(z) > \text{abs}(e^{a T_s}) (z−eaTs)2aTsz,abs(z)>abs(eaTs) |
| e a t t 2 e^{at}t^2 eatt2 | 2 ( s − a ) 3 , Re ( s ) > a \frac{2}{(s - a)^3}, \text{Re}(s) > a (s−a)32,Re(s)>a | a T s 2 z ( z + e a T s ) ( z − e a T s ) 3 , abs ( z ) > abs ( e a T s ) \frac{a T_s^2 z (z + e^{a T_s})}{(z - e^{a T_s})^3}, \text{abs}(z) > \text{abs}(e^{a T_s}) (z−eaTs)3aTs2z(z+eaTs),abs(z)>abs(eaTs) |
| sinh ( a t ) \sinh(at) sinh(at) | a s 2 − a 2 , Re ( s ) > abs ( a ) \frac{a}{s^2 - a^2}, \text{Re}(s) > \text{abs}(a) s2−a2a,Re(s)>abs(a) | T s z sinh ( a T s ) z 2 − 2 z cosh ( a T s ) + 1 , abs ( z ) > 1 \frac{T_s z \sinh(a T_s)}{z^2 - 2z \cosh(a T_s) + 1}, \text{abs}(z) > 1 z2−2zcosh(aTs)+1Tszsinh(aTs),abs(z)>1 |
| cosh ( a t ) \cosh(at) cosh(at) | s s 2 − a 2 , Re ( s ) > abs ( a ) \frac{s}{s^2 - a^2}, \text{Re}(s) > \text{abs}(a) s2−a2s,Re(s)>abs(a) | T s z ( z − cosh ( a T s ) ) z 2 − 2 z cosh ( a T s ) + 1 , abs ( z ) > 1 \frac{T_s z (z - \cosh(a T_s))}{z^2 - 2z \cosh(a T_s) + 1}, \text{abs}(z) > 1 z2−2zcosh(aTs)+1Tsz(z−cosh(aTs)),abs(z)>1 |
| t e − a t sin ( ω t ) t e^{-at} \sin(\omega t) te−atsin(ωt) | 2 ω ( s + a ) [ ( s + a ) 2 + ω 2 ] 2 , Re ( s ) > − a \frac{2\omega(s + a)}{[(s + a)^2 + \omega^2]^2}, \text{Re}(s) > -a [(s+a)2+ω2]22ω(s+a),Re(s)>−a | a T s z sin ( ω T s ) ( z 2 − 2 a z cos ( ω T s ) + a 2 ) ( z 2 − 2 a z cos ( ω T s ) + a 2 ) 2 , abs ( z ) > abs ( e a T s ) \frac{a T_s z \sin(\omega T_s) (z^2 - 2az \cos(\omega T_s) + a^2)}{(z^2 - 2az \cos(\omega T_s) + a^2)^2}, \text{abs}(z) > \text{abs}(e^{a T_s}) (z2−2azcos(ωTs)+a2)2aTszsin(ωTs)(z2−2azcos(ωTs)+a2),abs(z)>abs(eaTs) |
| t e − a t cos ( ω t ) t e^{-at} \cos(\omega t) te−atcos(ωt) | ( s + a ) 2 − ω 2 [ ( s + a ) 2 + ω 2 ] 2 , Re ( s ) > − a \frac{(s + a)^2 - \omega^2}{[(s + a)^2 + \omega^2]^2}, \text{Re}(s) > -a [(s+a)2+ω2]2(s+a)2−ω2,Re(s)>−a | T s z ( z 2 − 2 a z cos ( ω T s ) + a 2 ) ( z − a cos ( ω T s ) ) − a z 2 sin 2 ( ω T s ) ( z 2 − 2 a z cos ( ω T s ) + a 2 ) 2 , abs ( z ) > abs ( e a T s ) \frac{T_s z (z^2 - 2az \cos(\omega T_s) + a^2) (z - a \cos(\omega T_s)) - az^2 \sin^2(\omega T_s)}{(z^2 - 2az \cos(\omega T_s) + a^2)^2}, \text{abs}(z) > \text{abs}(e^{a T_s}) (z2−2azcos(ωTs)+a2)2Tsz(z2−2azcos(ωTs)+a2)(z−acos(ωTs))−az2sin2(ωTs),abs(z)>abs(eaTs) |
要从给定的任意传递函数
G
(
s
)
G(s)
G(s)获取其对应的Z变换,通常有两种常见的方法:

1. 离散化方法(基于采样)
这种方法是通过对连续系统进行离散化处理来得到其离散时间模型。可以通过以下步骤将传递函数 G ( s ) G(s) G(s)转换为离散时间系统的Z变换:
步骤:
-
选择采样时间:选择合适的采样时间 T T T(通常是系统的采样周期)。
-
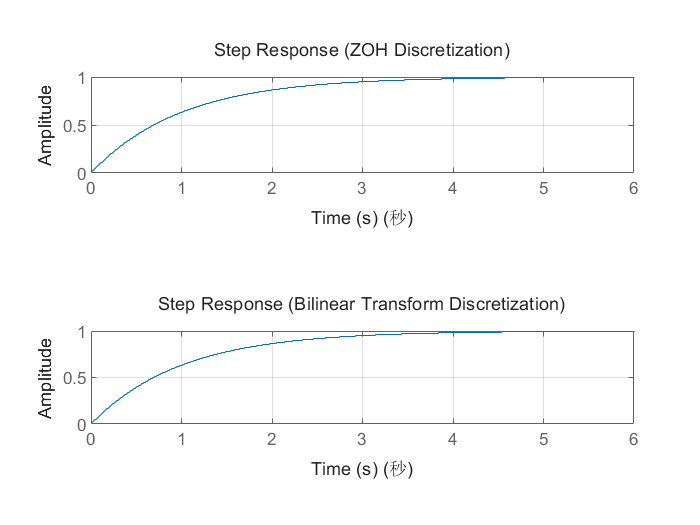
离散化方法:使用常见的离散化方法,例如:
- 零阶保持(Zero-Order Hold, ZOH):适用于大多数实际系统,保持采样期间输入信号为常数。
- 双线性变换(Bilinear Transform):适用于模拟与数字之间的映射,尤其是频率范围较大的情况。
-
应用离散化方法:将传递函数 G ( s ) G(s) G(s)离散化为 G ( z ) G(z) G(z)。
- 对于ZOH,可以使用以下公式:
G ( z ) = Z { L − 1 ( G ( s ) s ) } G(z) = \mathcal{Z}\left\{ \mathcal{L}^{-1}\left( \frac{G(s)}{s} \right) \right\} G(z)=Z{L−1(sG(s))}
或使用双线性变换,得到:
G ( z ) = G ( 2 T ⋅ z − 1 z + 1 ) G(z) = G\left(\frac{2}{T} \cdot \frac{z - 1}{z + 1}\right) G(z)=G(T2⋅z+1z−1)
其中, T T T是采样时间。
- 对于ZOH,可以使用以下公式:
2. 拉普拉斯- Z变换对照表
另一种较为直接的方法是利用拉普拉斯变换和Z变换之间的对照表。对于已知的连续时间传递函数 G ( s ) G(s) G(s),可以根据已知的对应关系从表中查找其对应的Z变换。常见的对照关系如下:
- 对于传递函数
G
(
s
)
G(s)
G(s),可以使用以下关系得到Z变换:
Z变换 ( G ( s ) ) = G ( z ) \text{Z变换}(G(s)) = G(z) Z变换(G(s))=G(z)
然后将 s s s替换为相应的 z z z对应关系。例如,对于一阶低通系统,其拉普拉斯变换为:
G ( s ) = K s + a G(s) = \frac{K}{s + a} G(s)=s+aK
对应的Z变换为:
G ( z ) = K 1 − a z − 1 G(z) = \frac{K}{1 - az^{-1}} G(z)=1−az−1K
3. 数值方法(数字仿真)
对于任意复杂的传递函数 G ( s ) G(s) G(s),还可以使用数值方法通过直接的离散化来获取其Z变换。这种方法通常通过将传递函数的拉普拉斯变换进行数值积分或通过模型仿真来实现。
例如,使用Matlab或者Python等工具,可以通过直接仿真、离散化或使用scipy.signal(Python)或者matlab中的c2d函数进行离散化。
4. 分式展开法(Partial Fraction Expansion)
如果
G
(
s
)
G(s)
G(s)可以表示为简单的分式形式,可以尝试将其分解为各个部分并找到相应的Z变换。例如,若有:
G
(
s
)
=
1
s
+
a
G(s) = \frac{1}{s + a}
G(s)=s+a1
可以通过将其离散化,得到对应的Z变换。
小结
总结来说,快速从给定的 G ( s ) G(s) G(s)得到对应的Z变换的方法有很多,选择合适的离散化方法(如ZOH、双线性变换)和数值计算工具(如Matlab、Python)通常是最常用的解决方案。如果你有具体的传递函数形式,可以根据这些方法进一步处理。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









