PCL使用RANSAC算法做聚类分割
最新推荐文章于 2025-01-18 08:39:51 发布

 672
1万+
227
688
963
587
672
1万+
227
688
963
587

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











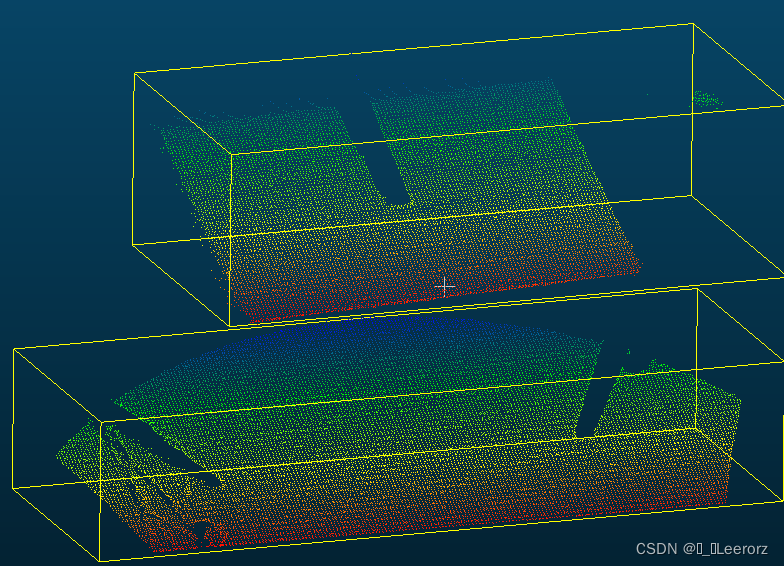
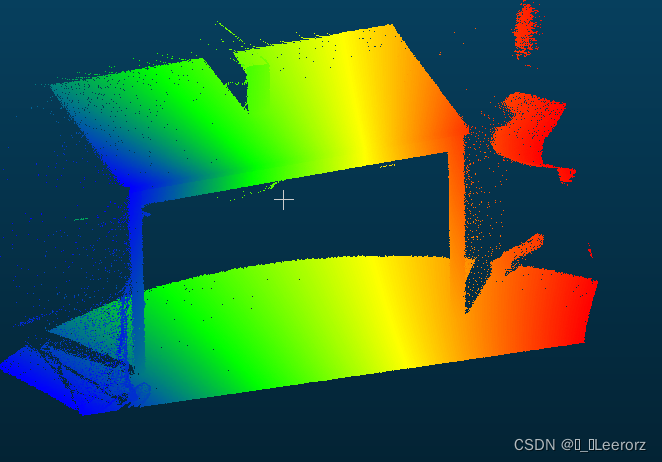
 本文介绍了使用RANSAC算法在PCL库中进行点云聚类分割的方法。首先展示了算法应用的效果图,包括原始点云、抽取的平面和点云。接着详细解释了RANSAC算法的工作原理,包括模型拟合、内点和外点的判断、迭代过程以及超参数设置。最后给出了代码实现,涉及的关键参数包括模型类型、算法类型、迭代次数和距离阈值。
本文介绍了使用RANSAC算法在PCL库中进行点云聚类分割的方法。首先展示了算法应用的效果图,包括原始点云、抽取的平面和点云。接着详细解释了RANSAC算法的工作原理,包括模型拟合、内点和外点的判断、迭代过程以及超参数设置。最后给出了代码实现,涉及的关键参数包括模型类型、算法类型、迭代次数和距离阈值。

 订阅专栏 解锁全文
订阅专栏 解锁全文

























