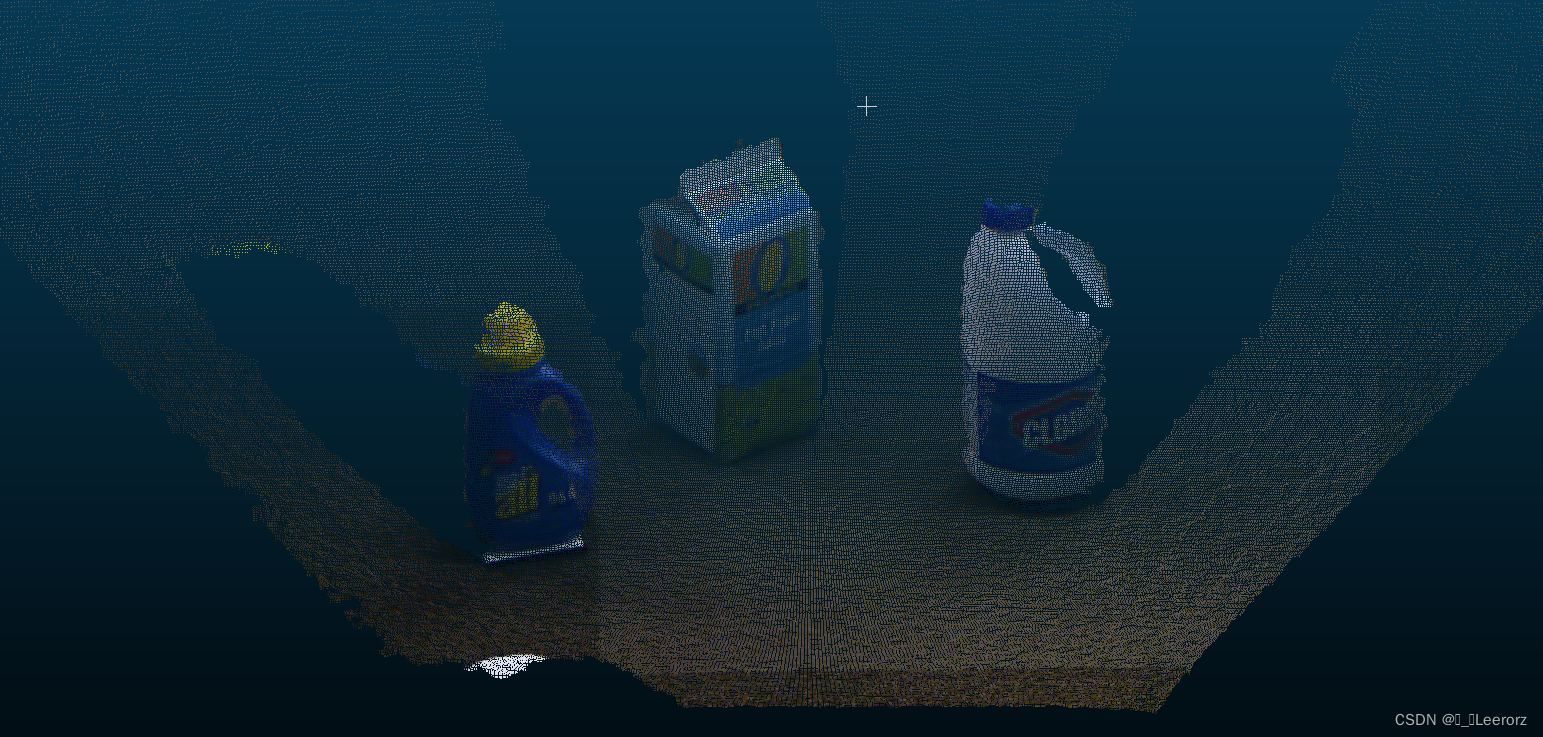
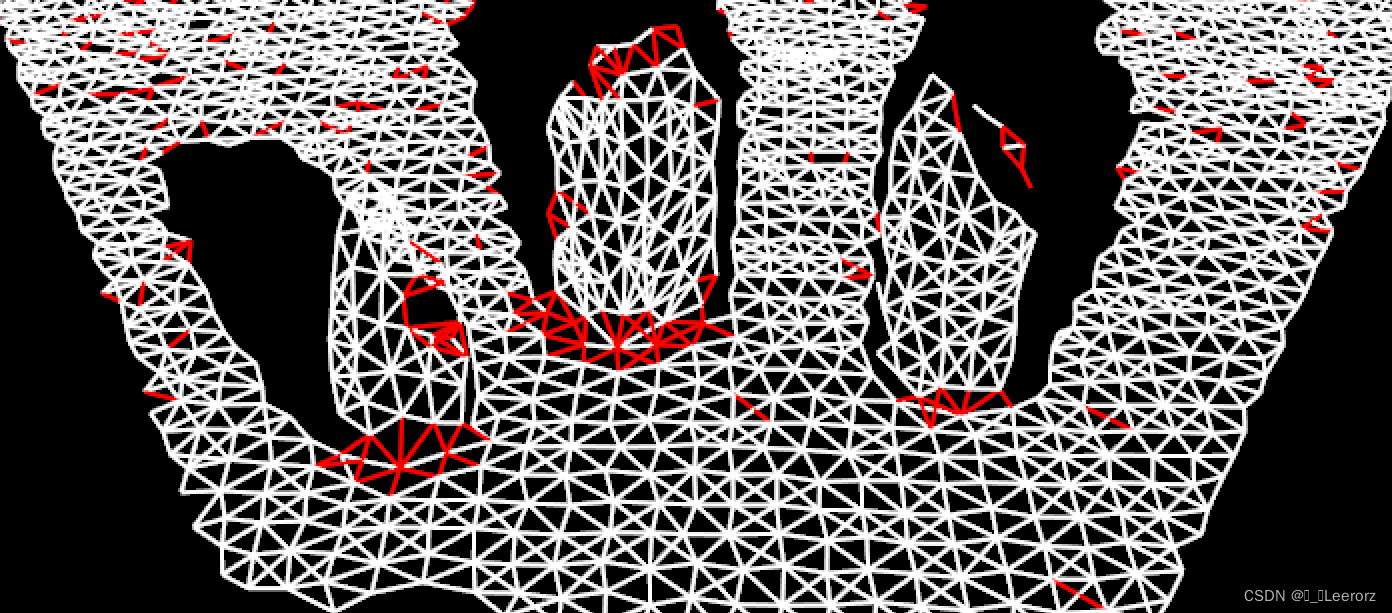
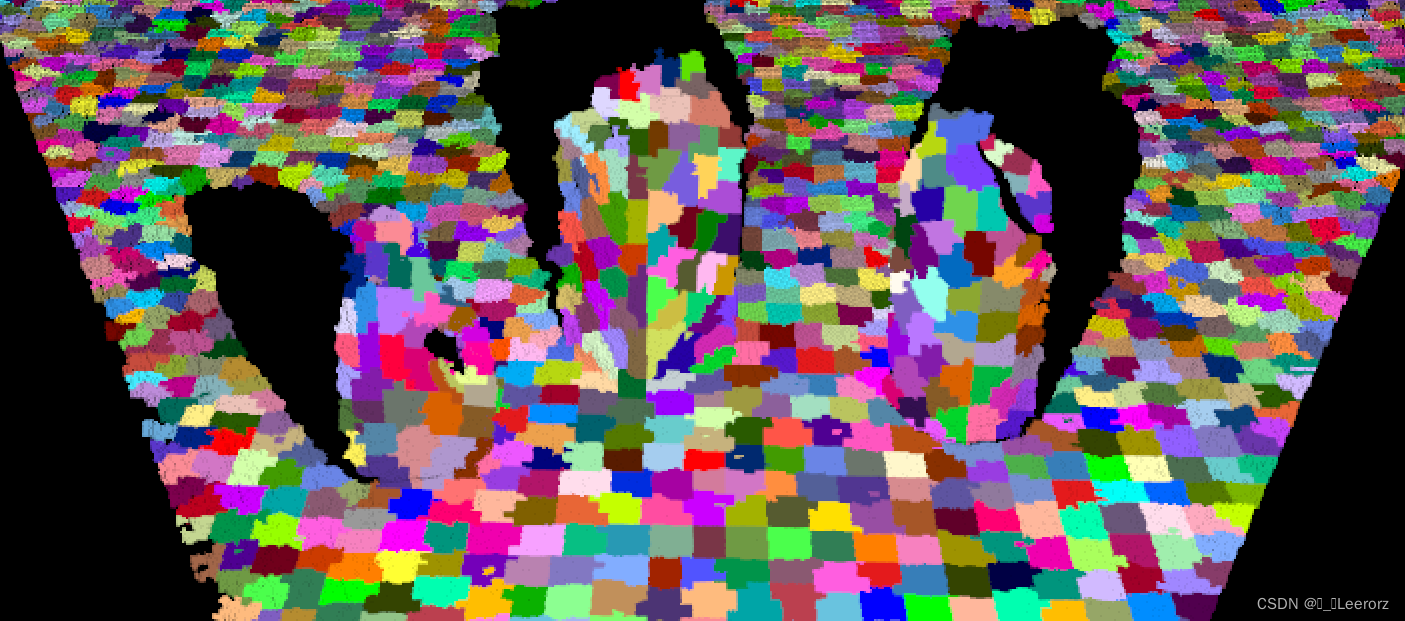
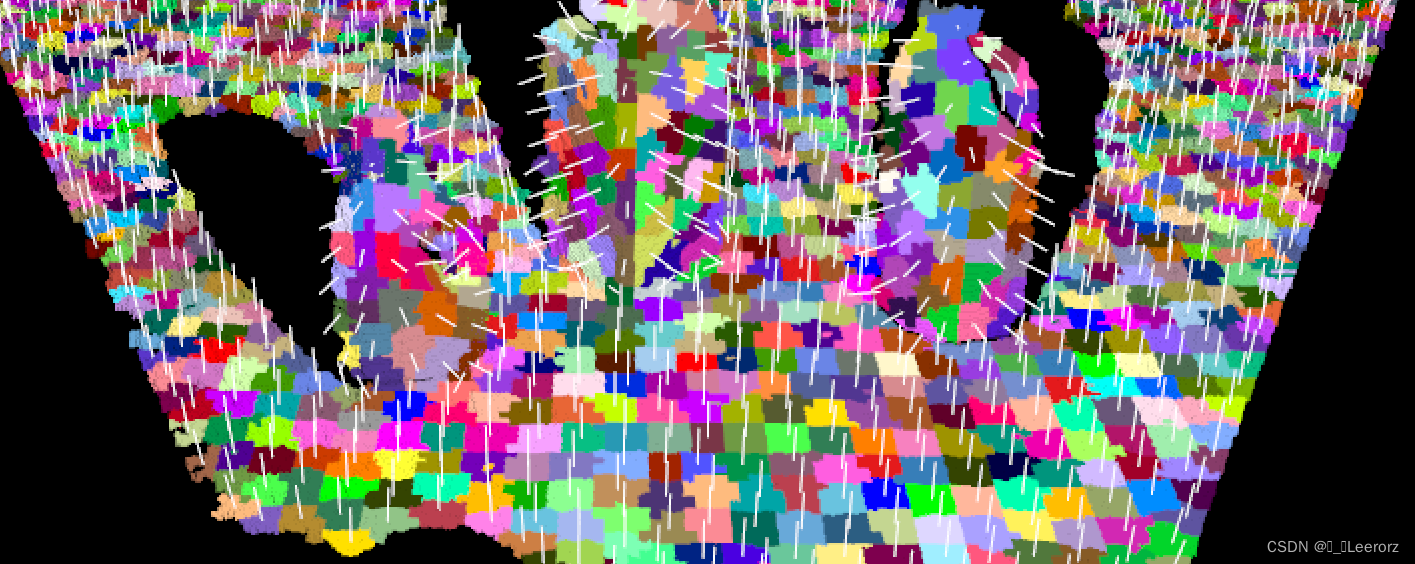
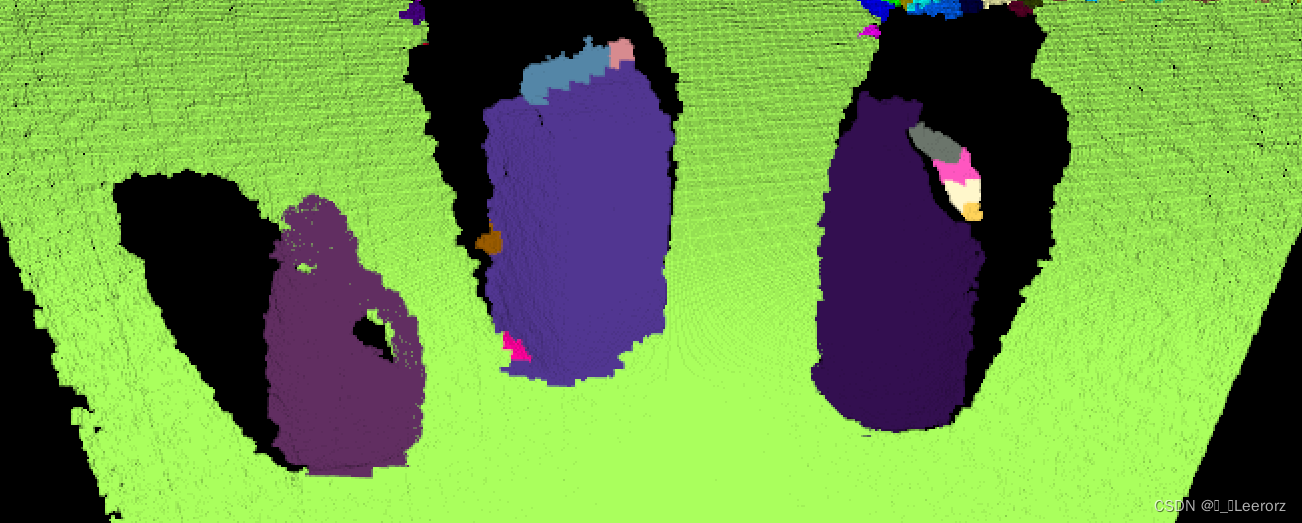
点云对象部分分割 效果图 原理介绍 局部凹性计算和提取 效果图 原始点云 邻接图Adjacency Graph 红色表示Concave,白色表示Convex 超体素Supervoxel 超体素的法向量 分割图 原理介绍 我们人眼可以轻松分辨未知对象的不同部分,这可以当作是一种无监督的方法。当我们使用3D点云数据的局部凹性Concavity作为指标








 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 本文介绍了使用PCL库进行点云目标分割的方法,特别是通过约束平面裁剪和局部凹性计算。首先展示分割效果,接着解释利用3D点云的局部凹性作为无监督分割的依据,再详细阐述了算法原理,包括局部约束几何边界模型和贪婪切割策略。最后,探讨了如何计算和提取局部凹性以实现精确分割。
本文介绍了使用PCL库进行点云目标分割的方法,特别是通过约束平面裁剪和局部凹性计算。首先展示分割效果,接着解释利用3D点云的局部凹性作为无监督分割的依据,再详细阐述了算法原理,包括局部约束几何边界模型和贪婪切割策略。最后,探讨了如何计算和提取局部凹性以实现精确分割。

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 60万+
60万+







