







 这篇博客介绍了ROS的基本应用,包括启动ROS Master的`roscore`命令,使用`rosnode`的各种操作,以及话题(topics)的查看、监听和发布。还提到了`rqt_graph`用于节点可视化,`rqt_plot`用于数据可视化,以及`rosservice`服务的简单使用,例如创建小海龟节点。通过这些实例,读者可以对ROS有一个初步的认识。
这篇博客介绍了ROS的基本应用,包括启动ROS Master的`roscore`命令,使用`rosnode`的各种操作,以及话题(topics)的查看、监听和发布。还提到了`rqt_graph`用于节点可视化,`rqt_plot`用于数据可视化,以及`rosservice`服务的简单使用,例如创建小海龟节点。通过这些实例,读者可以对ROS有一个初步的认识。
- ROS应用:
Oregon State University
Interaction Lab,University of Southern California
Savioke
MyzharBot by Walter "Myzhar" Lucetti
University of Tubingen (车跟人)
Robotnik
- ROS常用命令
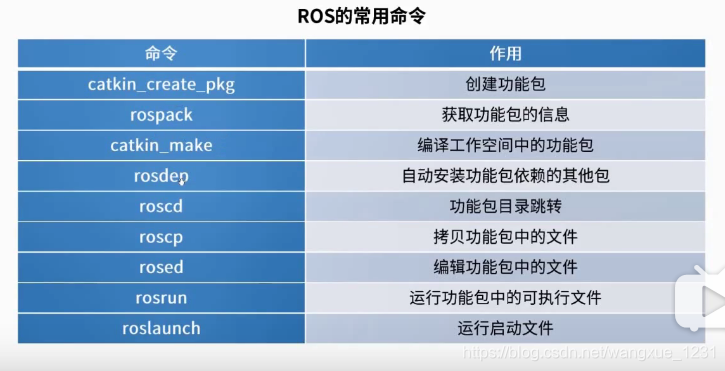
- roscore : 启动ROS Master
- ctrl+c :强制结束当前进程
- ros+Tab:显示所有ros命令
- rosnode +Tab : rosnode 搭配方法
(使用不灵活?????) - rosnode --help : rosnode 搭配使用技巧
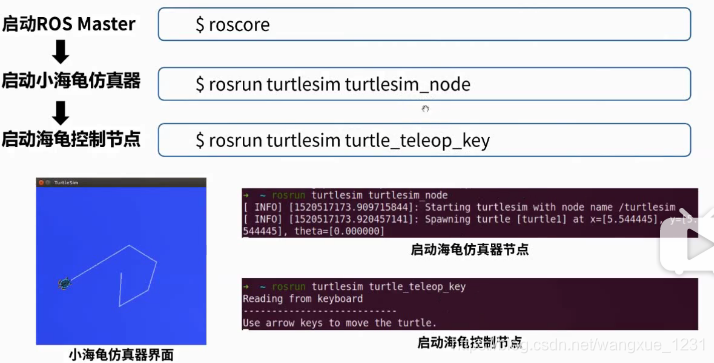
- ROS例程
- roscore
- 新建一个终端
rosrun turtlesim turtlesim_node
(rosrun +节点所在功能包 +节点名:启动节点) - 新建一个终端
rosrun turtlesim turtle_teleop_key
选中第三个终端才能键盘控制海归
4.
- 新建一个终端
rqt_graph (计算图:节点可视化)
rosn
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 401
401

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









