



机器人一直使用kinco的底盘,从软件工具kincoServco上可以看到急停的详细状态
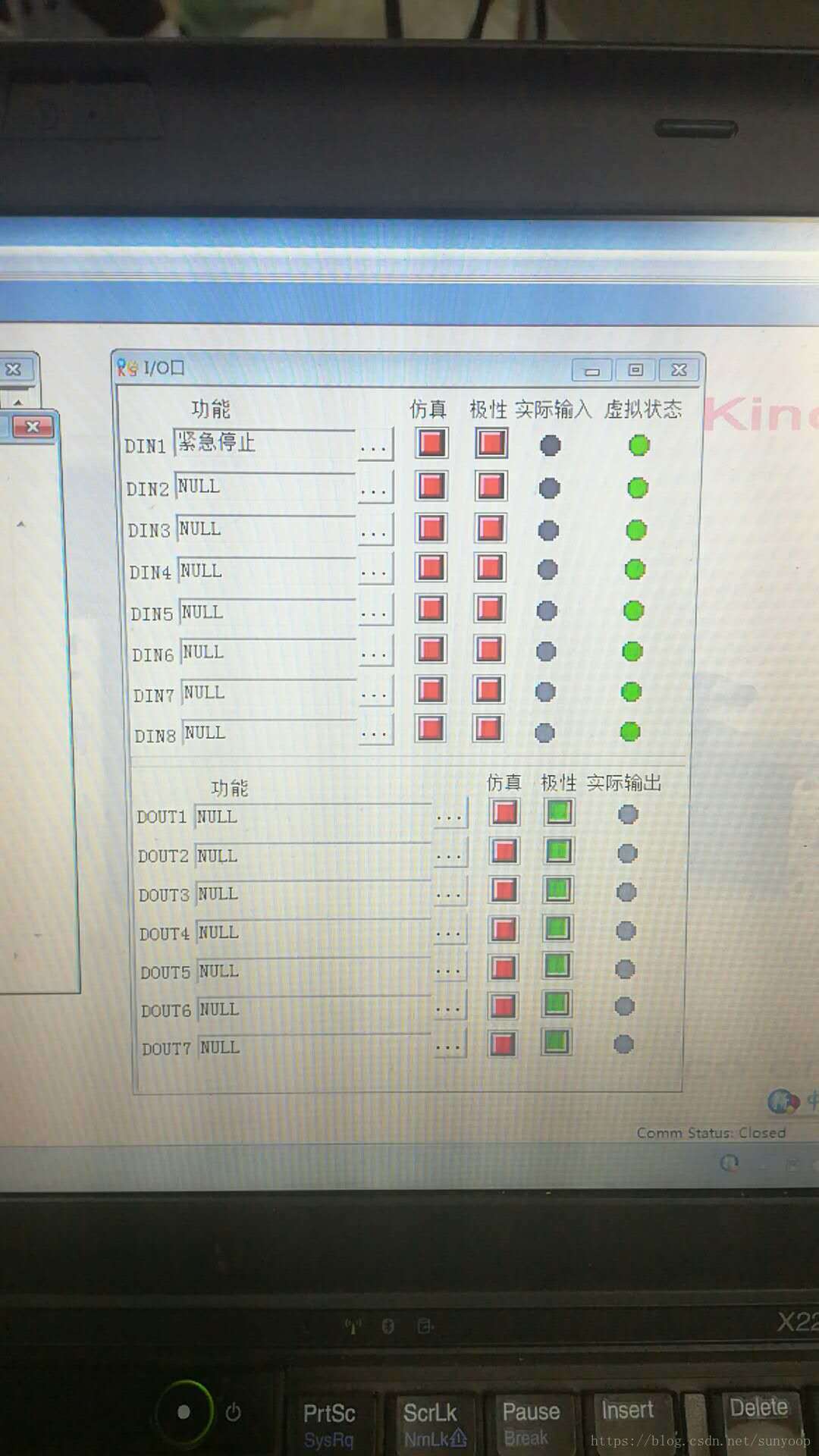
连接上底盘后,代开I/O端口,里面第一个DIN1就是急停的选项。

这个位置如果是绿色指明正处于急停状
极性:当极性改变时,急停开关的按下与弹起会反过来。
状态保存:正常急停如下,按下后的状态
需要在基本操作里面,将存储IO配置参数添加到基本操作中,然后设置成1回车保存。
 kinco底盘急停功能详解
kinco底盘急停功能详解
 本文介绍了一款使用kinco底盘的机器人中急停功能的实现方式及配置方法。通过kincoServco软件可以查看急停状态,并通过I/O端口的DIN1选项进行设置。文章还介绍了如何更改极性以及如何保存状态。
本文介绍了一款使用kinco底盘的机器人中急停功能的实现方式及配置方法。通过kincoServco软件可以查看急停状态,并通过I/O端口的DIN1选项进行设置。文章还介绍了如何更改极性以及如何保存状态。
机器人一直使用kinco的底盘,从软件工具kincoServco上可以看到急停的详细状态
连接上底盘后,代开I/O端口,里面第一个DIN1就是急停的选项。
这个位置如果是绿色指明正处于急停状
极性:当极性改变时,急停开关的按下与弹起会反过来。
状态保存:正常急停如下,按下后的状态
需要在基本操作里面,将存储IO配置参数添加到基本操作中,然后设置成1回车保存。

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





















 579
579





