



vrep版本4.0
将solidwork中的装配体导出为stl文件导入到vrep中,在vrep中建立joint,后搞好树状关系。
如果不想在vrep中建立joint,可以直接从solidwork导出机械臂的urdf,b站有教程。
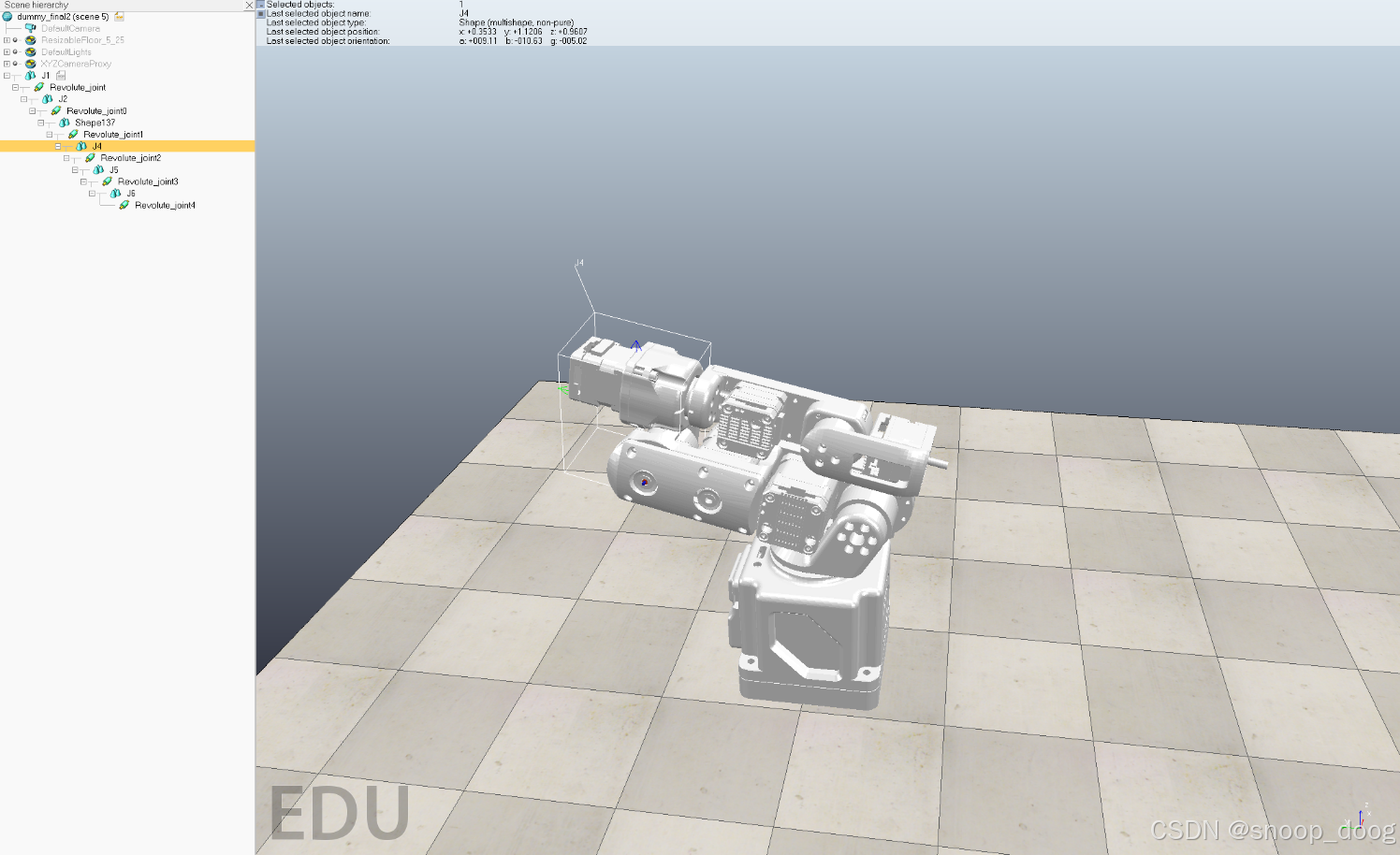
图: 建立好joint的机械臂
如果想进行与matlab通讯,这几个设置要搞好:
1:基座的属性

2:其他轴的设置
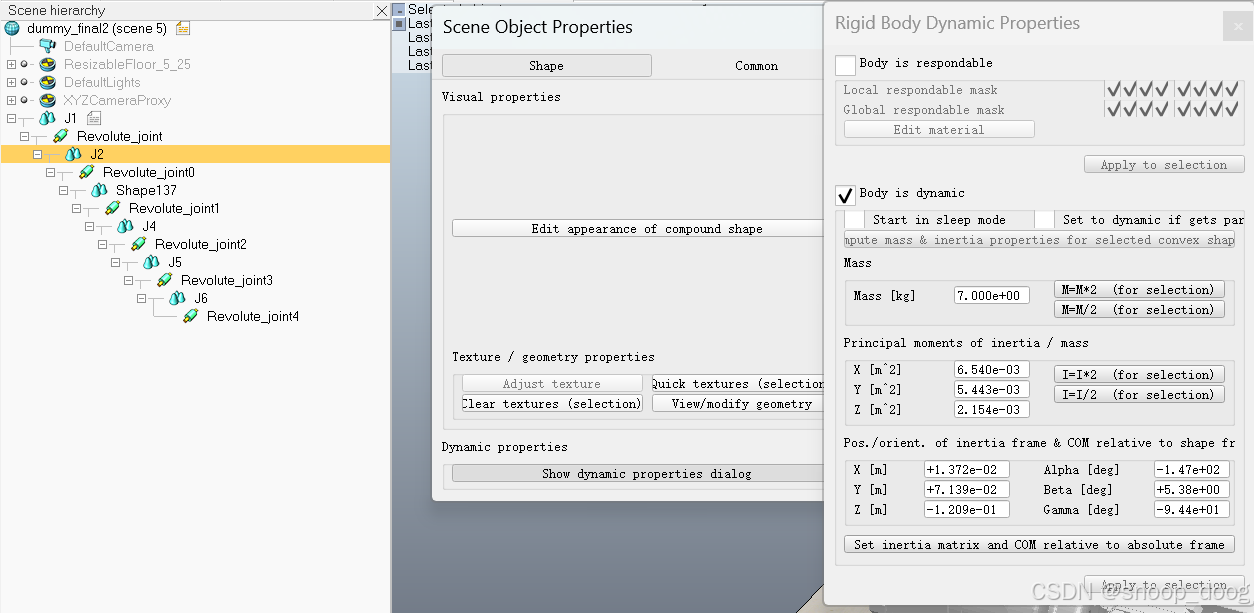
区别是设置为Body is dynamic
3:joint的设置
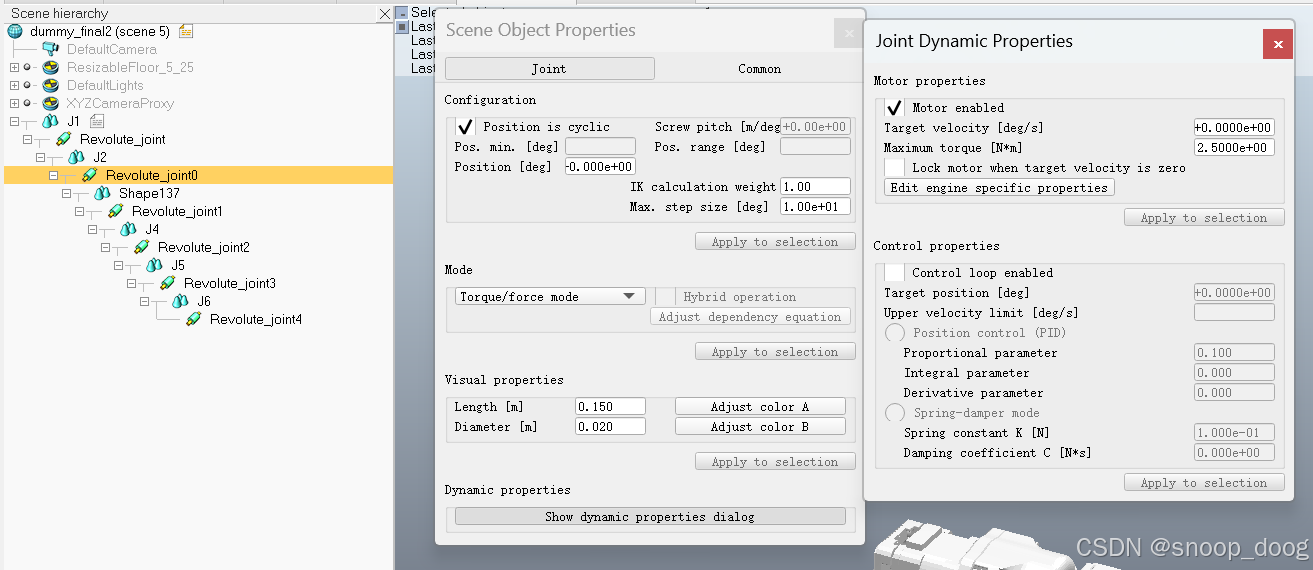
注意模式一定要为Torque/force mode,其中的Motor enabled要勾选

















 1688
1688

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









