



问题一:在ubuntu终端中使用apt install下载C++的库文件到ubuntu默认的路径下吗?
答:是的,在 Ubuntu 终端中使用 apt install 安装 C++ 的库时,这些库文件(包括头文件和 .so 动态链接库)会被自动安装到系统的默认路径下,并且被 CMake、GCC 等编译器自动识别。

如果你担心某个库找不到,可以在命令行中运行:
dpkg -L libceres-dev | grep cmake
问题2:如果我电脑有个库是比较旧的版本,然后我的cartographer需要这个库的新的版本,我是要去把那个旧版本的库卸载掉,然后下载新的版本是吗?
答:如果 Cartographer 需要一个库的较新版本,而你系统中已有的是旧版本,为了确保兼容性,通常需要卸载旧版本并安装新版本。


在编译 cartographer 时指定路径:
catkin_make_isolated --install --cmake-args -DCeres_DIR=/home/yourname/libs/ceres/lib/cmake/Ceres
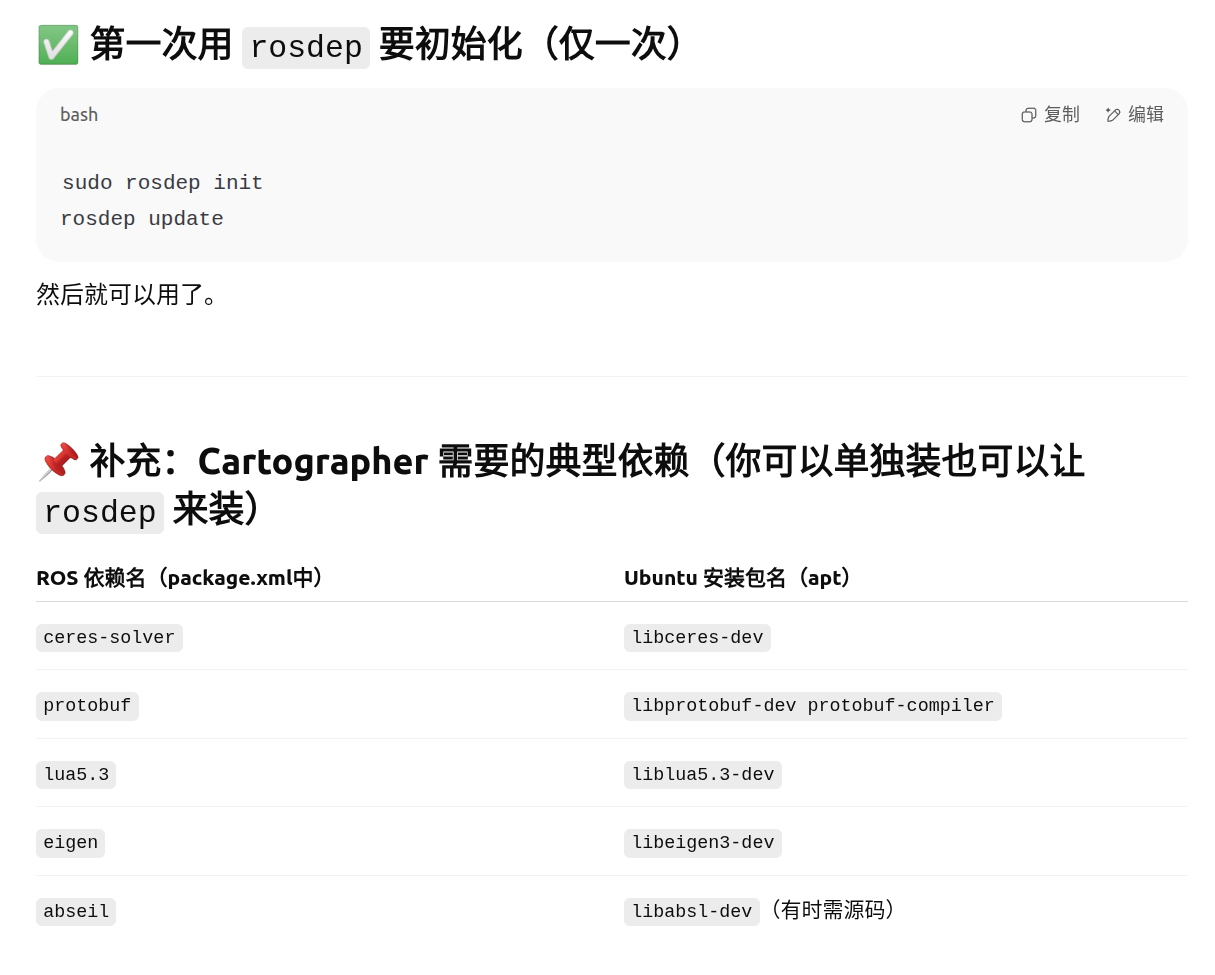
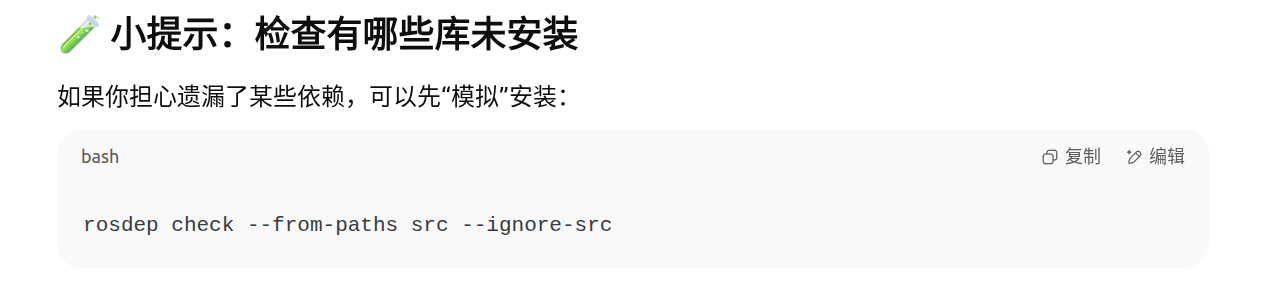
问题3:但是我在刚下载cartographer_ros后,我并不知道这个功能包需要哪些库,我该怎么去下载它对应要的库?
答:

















 2174
2174

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









