



 文章讲述了在conda的bash环境中遇到catkin_make编译问题的解决方案,包括临时解决方法(退出bash环境,重新创建workspace)和永久解决方法(安装empy或修改.bashrc中Python路径)。
文章讲述了在conda的bash环境中遇到catkin_make编译问题的解决方案,包括临时解决方法(退出bash环境,重新创建workspace)和永久解决方法(安装empy或修改.bashrc中Python路径)。
在conda的bash环境下进行catkin_make后出现报错
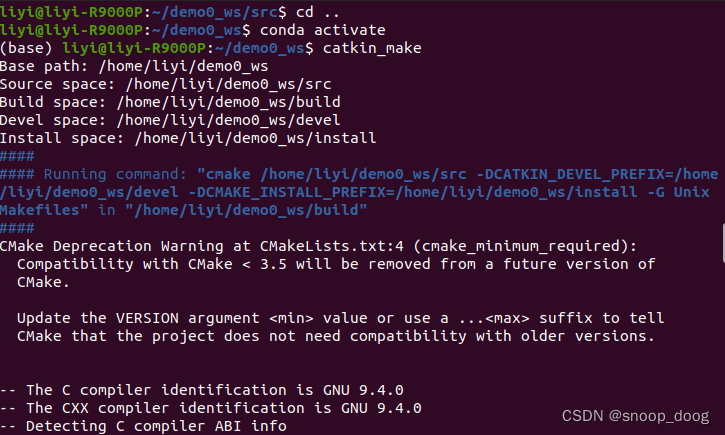
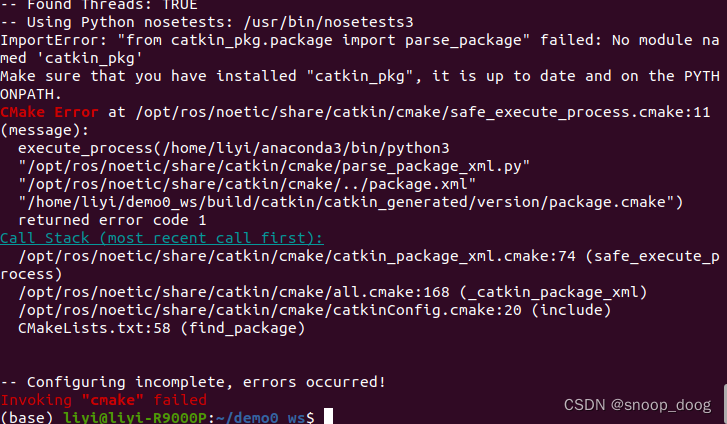
原因:在bash环境下无法正法编译
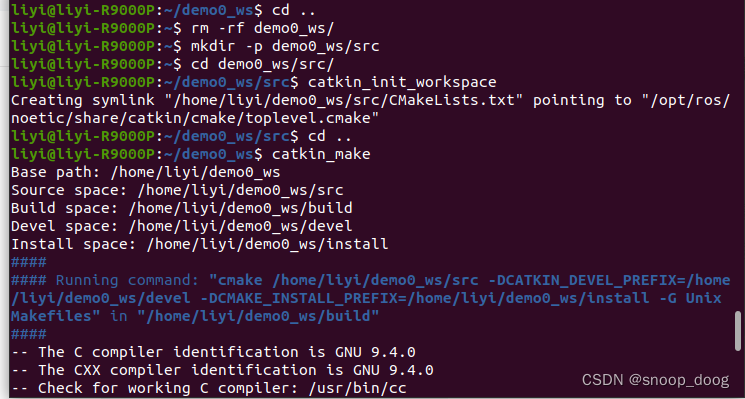
于是用 conda deactivate 来退出bash环境
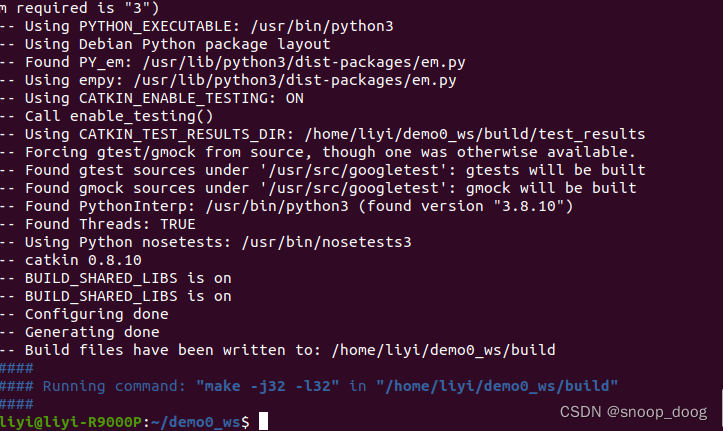
重新创建workspace后编译正常
永久解决问题方法:
使用的是anaconda的Python环境,用conda list 看看你有没有安装 empy,没有装的话就要在conda里面安装它,conda install -c conda-forge empy
还有个方法就是不用anaconda的Python环境,把.bashrc里面的 export PATH="/home/用户名/anaconda3/bin:$PATH" 注释掉,再source一下


















 939
939



 到【灌水乐园】发言
到【灌水乐园】发言








