




目的和范围
指挥官模块是 PX4 自动驾驶系统的中央状态机和业务逻辑协调器。它管理飞行器的布防/撤防、飞行模式转换、故障安全处理和安全系统。指挥官是主要的决策机构,负责协调飞行员输入、地面控制指令和自主飞行操作。
系统概述
Commander 模块充当高级监控器,负责维护车辆整体状态并协调不同运行模式之间的转换。它处理来自多个来源的命令,执行安全检查,并发布系统中其他模块使用的权威车辆状态信息。
指挥官架构

核心组件
Commander 模块围绕几个关键类构建,这些类处理车辆状态管理的不同方面:
指挥官级
主Commander类继承自ModuleBase<Commander>和ModuleParams,提供主要的执行循环和参数管理。主要职责包括:
- 通过处理车辆命令
handle_command() arm()通过和disarm()方法管理布防/撤防- 协调所有子系统的定期更新
- 发布车辆状态信息
Commander 类使用车辆状态的默认值进行初始化,将布防状态设置为解除布防,并初始化各个子系统:
Commander::Commander() :
ModuleParams(nullptr)
{
_vehicle_land_detected.landed = true;
_vehicle_status.arming_state = vehicle_status_s::ARMING_STATE_DISARMED;
_vehicle_status.system_id = 1;
_vehicle_status.component_id = 1;
// ...
}状态管理组件
| 成分 | 班级 | 主要功能 |
|---|---|---|
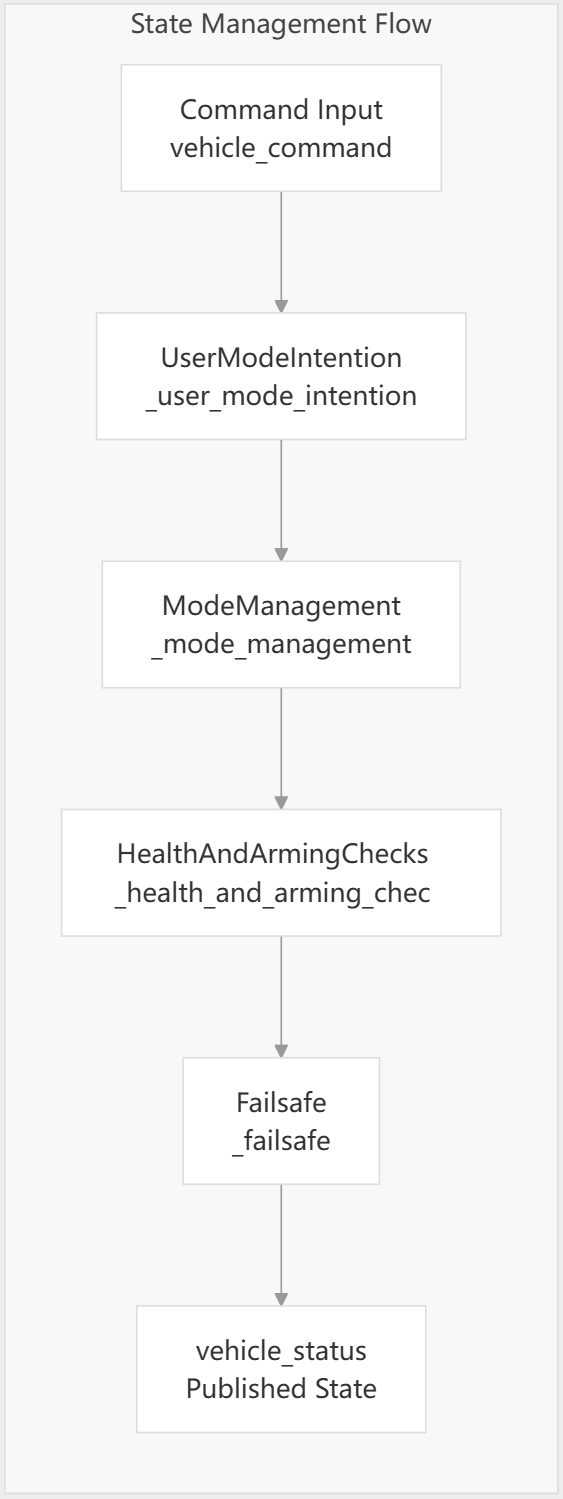
| 用户模式意图 | UserModeIntention |
跟踪并验证用户请求的飞行模式 |
| 模式管理 | ModeManagement |
验证模式转换并强制执行约束 |
| 健康检查 | HealthAndArmingChecks |
执行飞行前安全验证 |
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 721
721

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









