




目的和范围
本文档涵盖 PX4 中的传感器集成子系统,该子系统负责采集、验证和处理来自各种来源(包括 GPS/GNSS、磁场传感器以及连接 UAVCAN 的设备)的传感器数据。该系统为状态估计和控制系统使用传感器数据提供了统一的接口。
有关使用这些传感器数据的核心状态估计算法的信息,请参阅扩展卡尔曼滤波器 (EKF2)。
传感器集成架构
PX4 传感器集成系统遵循模块化架构,其中各个传感器驱动程序将原始传感器数据发布到 uORB 主题,然后由验证模块和状态估计器使用。
高级传感器数据流
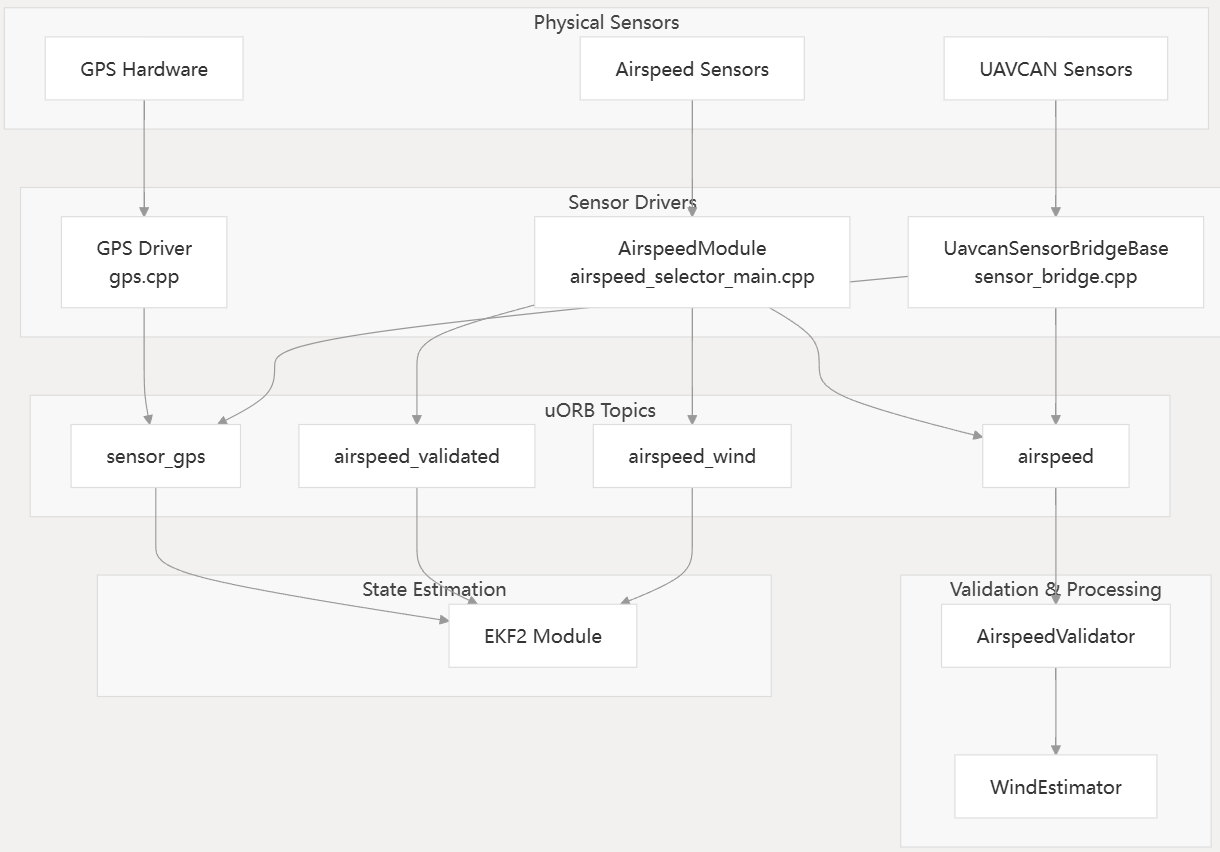
GPS/GNSS集成
GPS/GNSS 集成系统支持多种接收器和协议,为飞行堆栈提供位置、速度和时间信息。
GPS 驱动程序架构
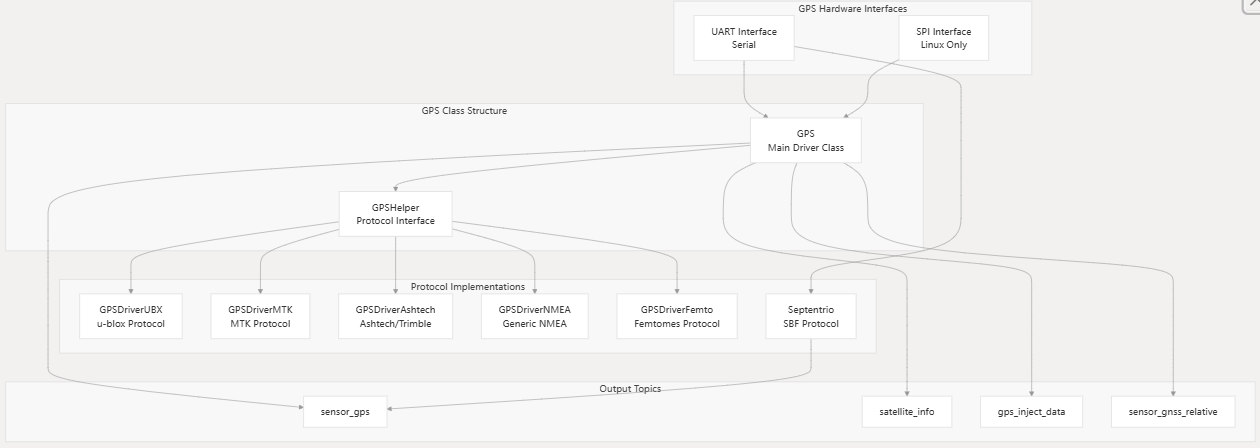
主GPS类管理硬件接口和协议检测,而GPSHelper子类则实现特定的 GPS 协议。该系统支持自动协议检测,并可同时处理多个 GPS 实例。像 Septentrio 这样的专用驱动程序实现了自己的协议处理。
关键组件:
GPS::run():主驱动循环处理协议检测和数据处理GPS::pollOrRead():读取 GPS 数据的硬件抽象GPS::handleInjectDataTopic():RTK GPS 的 RTCM 校正数据注入GPS::publishRelativePosition():处理双 GPS 航向数据
GPS配置和参数
GPS系统支持通过参数进行广泛的配置:
| 范围 | 目的 | 默认 |
|---|---|---|
GPS_1_PROTOCOL |
主要 GPS 协议选择 |
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 939
939

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









