




扩展卡尔曼滤波器 (EKF2) 模块是 PX4 自动驾驶系统的核心状态估计组件。它负责融合来自多个传感器的数据,以提供对飞行器姿态、位置、速度以及飞行控制所需的其他状态的可靠估计。本文档介绍了 EKF2 系统的架构、组件、操作和配置。
EKF2 采用模块化、可配置、抗传感器故障的设计,适用于各种车辆类型和操作条件。
架构概述
EKF2 模块使用处理估计过程不同方面的类的分层结构来实现。
类层次结构

该架构包括:
- EKF2 类:PX4 模块接口,用于处理与其他 PX4 模块的通信
- EstimatorInterface:定义状态估计器接口的基类
- Ekf 类:扩展卡尔曼滤波器算法的核心实现
- OutputPredictor:通过在过滤器更新之间传播状态来提供高速率输出
- 环形缓冲区:存储带有时间戳的传感器数据,用于延迟融合
状态向量
EKF状态向量包含以下组成部分:
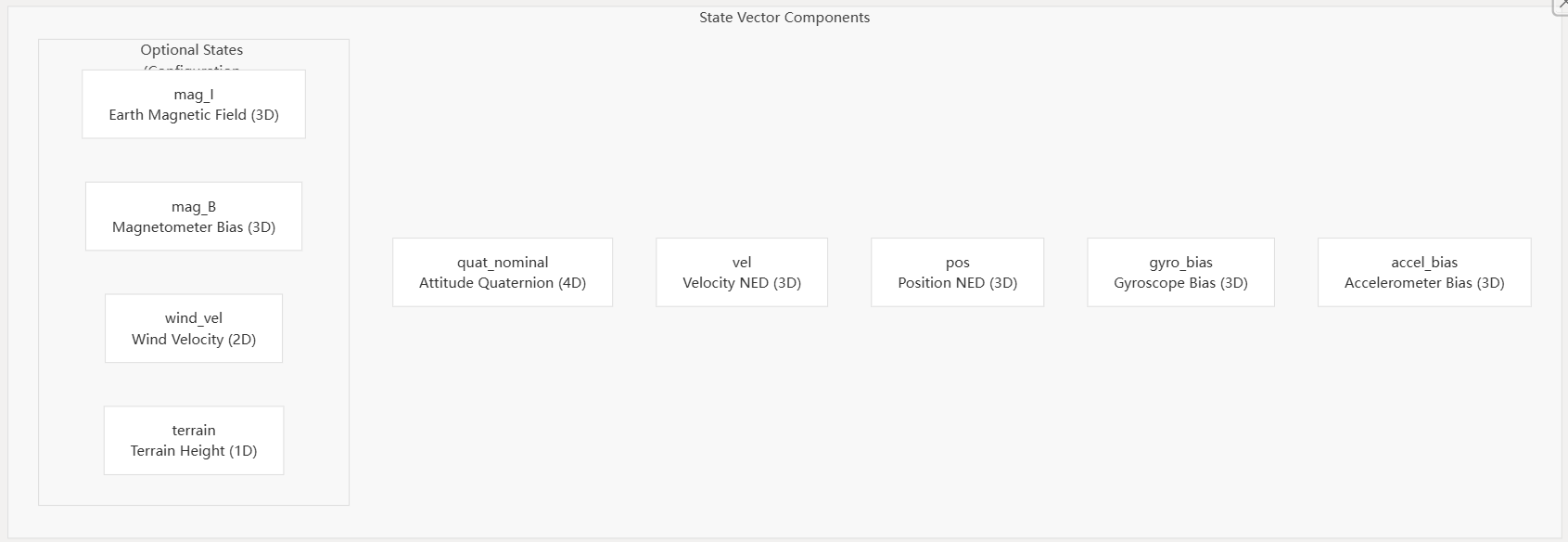
状态向量在结构中定义StateSample,包括:
- 姿态:表示车辆方向的四元数
- 速度:东北向下(NED)框架中的 3D 速度矢量
- 位置:NED 框架中的 3D 位置矢量
- 陀螺仪偏置:陀螺仪的 3D 偏置矢量
- 加速度计偏差:加速度计的 3D 偏差矢量
- 可选状态:根据配置,可能包括磁场、风速和地形高度
状态向量的大小和组成是在编译时根据配置选项确定的。
数据流
下图说明了数据如何流经 EKF2 系统:
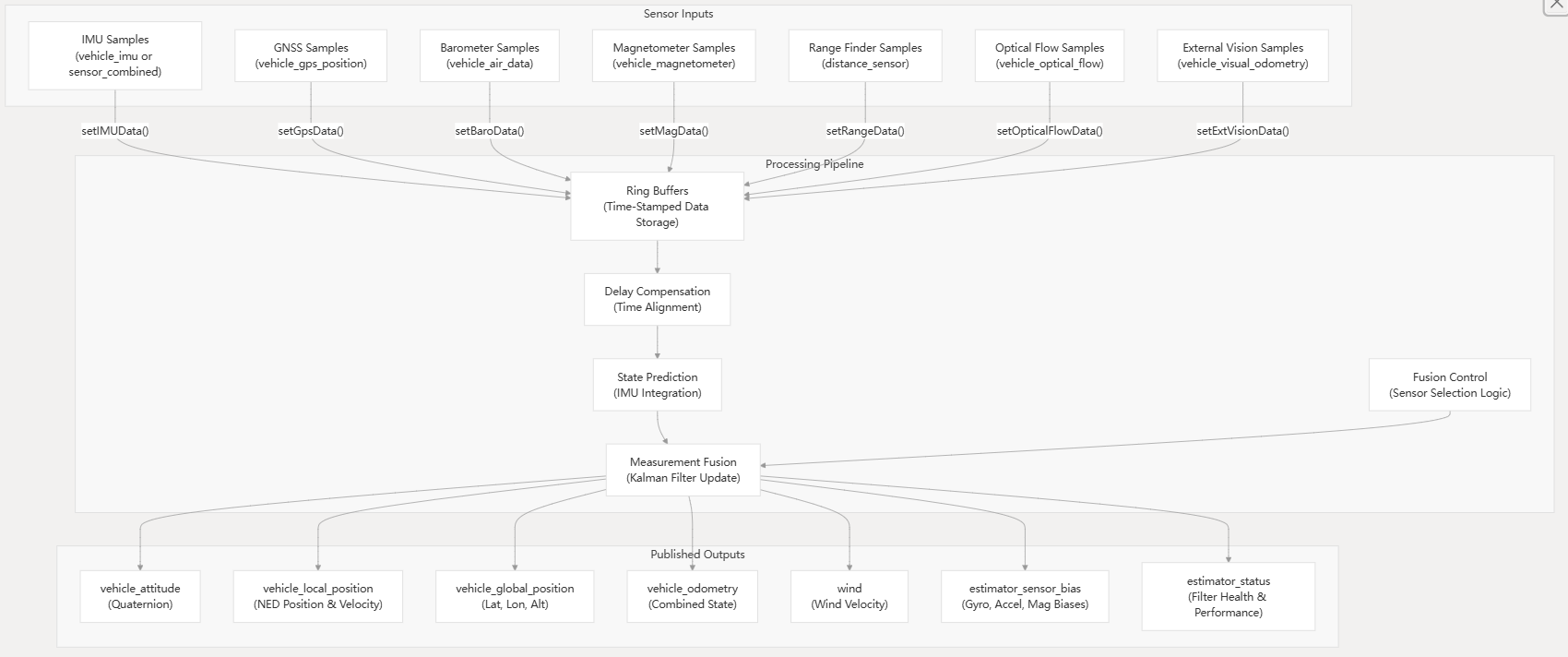
数据流过程包括:
- 传感器数据收集:通过 uORB 主题接收传感器数据
- 时间对齐:数据存储在带有时间戳的环形缓冲区中,以便延迟融合
- 状态预测:IMU 数据用于及时传播状态
- 测量融合:融合传感器测量值以校正预测状态
- 输出发布:估计状态发布到 uORB 主题,供其他模块使用
EKF2 模块在其自己的工作队列上运行,并由新的 IMU 数据触发。
传感器融合
EKF2 模块可以融合来自多个传感器的数据,以提供稳健的状态估计。融合过程由一组标志控制,这些标志决定使用哪些传感器。
融合控制标志

融合控制系统:
- 根据可用性和质量确定使用哪些传感器
- 管理不同传感器组合之间的转换
- 通过回退到替代源来处理传感器故障
- 当传感器数据有限时,提供劣化估计
Ekf 类中的函数controlFusionModes()负责根据传感器数据质量和可用性管理融合控制标志。
高度融合
EKF2 可以使用各种来源进行高度估计,由以下EKF2_HGT_REF参数控制:
| ID | 高度传感器 | 描述 | 优点 | 缺点 |
|---|---|---|---|---|
| 0 | 陀螺 | 气压计(气压高度) | 始终可用,稳定 | 受天气、地面效应影响 |
| 1 | 全球导航卫星系统 | GNSS 高度(参考椭球或 MSL) | 全球参考,无漂移 | 需要良好的卫星可见性 |
| 2 | RangeFinder |
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4927
4927

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









