




Mission Planner 中的地形数据系统提供任何地理位置的高程数据,支持任务规划、地形跟踪和避障功能。本页面记录了应用程序中用于检索地形数据的数据源、处理流程和 API。
有关利用地形数据的任务规划的信息,请参阅任务规划。
系统概述
Mission Planner 的地形数据系统提供来自多个来源的数字高程数据访问,并具有回退机制,可在可用时优先使用更高分辨率的数据源。该系统智能地管理数据的下载、缓存和访问,以便为应用程序的其他组件提供高程信息。
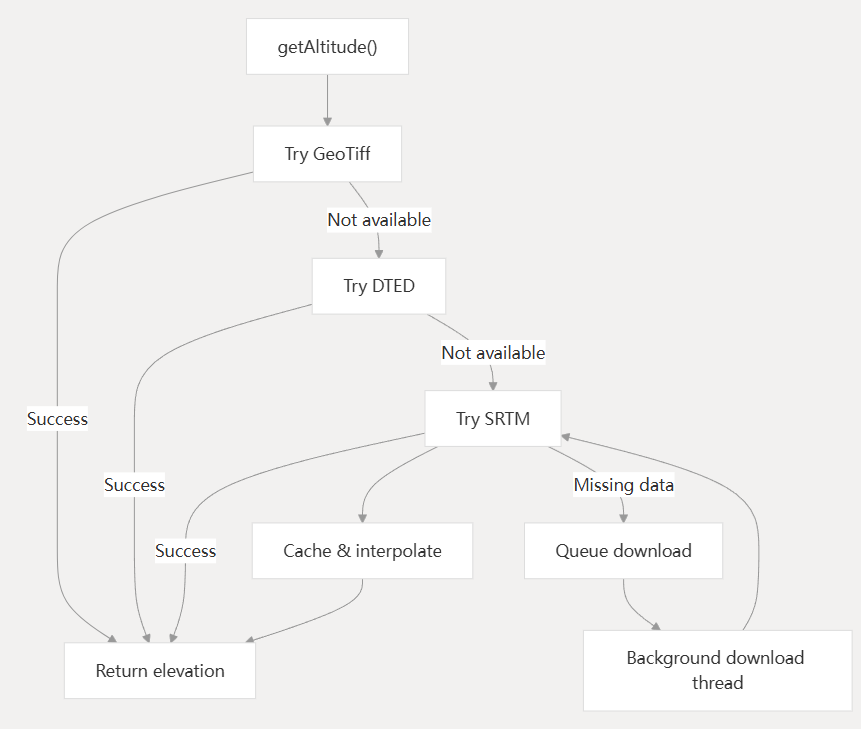
地形数据查找流程
数据源和格式
SRTM数据
SRTM(航天飞机雷达地形测绘任务)是主要数据源,提供以下全球高程数据:
- SRTM1:1角秒分辨率(~30米)
- SRTM3:3角秒分辨率(~90米)

SRTM数据检索过程
GeoTIFF 文件
GeoTIFF 格式提供在 TIFF 图像中嵌入地理元数据的地形数据,支持各种坐标系和投影。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1278
1278

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









