







前言
SLAM软件包Hector_Mapping
在上一篇笔记中,通过Hector_Mapping软件包实现了SLAM功能,运行了四条指令,有些麻烦。本文通过launch文件的使用将指令整合起来,方便功能的实现。
一、打开终端,输入cd catkin_ws1/src/,进入工作空间的src目录。
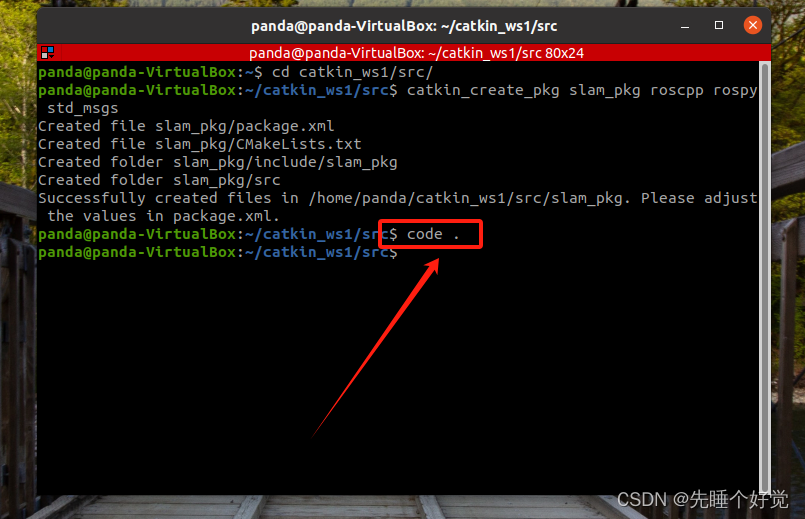
二、输入catkin_create_pkg slam_pkg roscpp rospy std_msgs来新建一个软件包slam_pkg

三、输入code . 打开代码编辑器VSCode
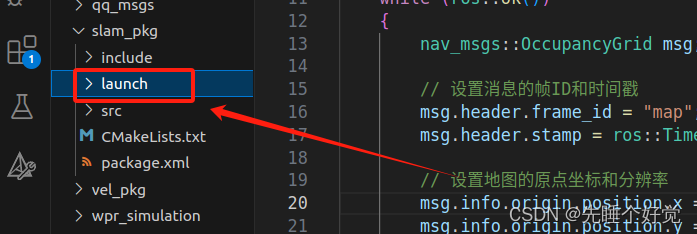
四、在slam_pkg软件包下创建launch子文件夹
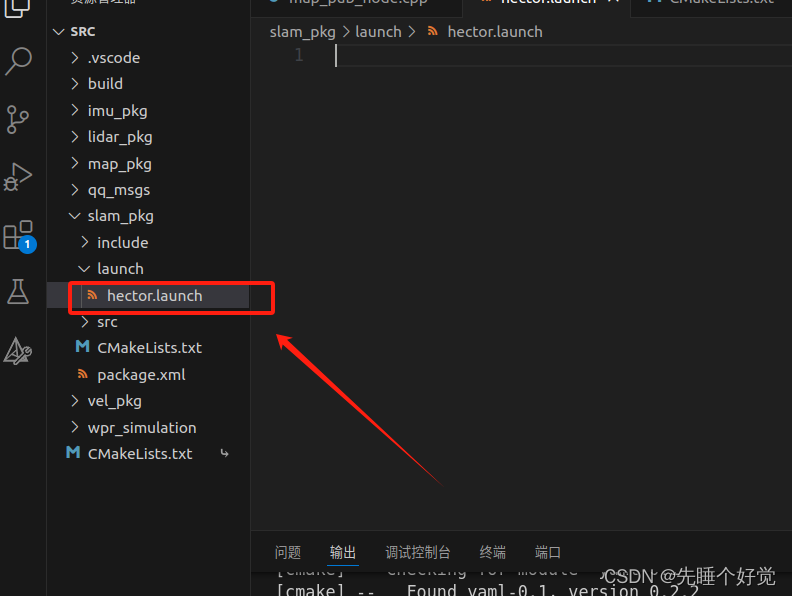
五、在launch文件夹下新建hector.launch文件
六、在launch文件中写入如下代码
<launch>
<!-- 载入 机器人 和 SLAM 的仿真场景 -->
<include file="$(find wpr_simulation)/launch/wpb_stage_slam.launch"/< 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 210
210

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











