







1、算法原理
在点云数据模型中将围成模型轮廓的点称为边界点,也称为边界特征点。边界特征点包含大量的曲面信息,对曲面重建质量有着非常重要的作用,它们不仅是连接不同曲面区域的桥梁,还是模型几何形状和拓扑结构的关键体现。正确地识别和提取边界特征点,有助于准确还原物体的三维形态,提升曲面重建的精度和逼真度。因此,在点云数据处理过程中,对边界特征点的检测和分析显得尤为重要。
BoundaryEstimation算法是PCL中用于点云边界估计的重要算法。该算法的核心原理基于点云数据的局部几何特性分析,旨在识别并提取出点云中的边界点。算法的具体步骤为:
第1步:先用数据点P和K邻域点估计一个局部平面,并将数据点P和K邻域点投射到该平面上;
第2步:其次在K邻域中选取到数据点P最近点Qi,并作有向向量PQi,以向量PQi作为基准,分别计算出数据点P与K个邻域点Qj的有向量PQj之间的夹角,得到夹角集合为:
![]()
,将得到的夹角集合重新按从小到大排列得到新的角度集合
![]()
,最后计算新角度集合S’两相邻角度的差,公式为
![]()
找出两角度之差差中的最大θmax值;
第3步:设定一个判断数据点P为边界点的阈值θTH,当θmax>θTH时认为数据点P为边界并且保留下来。阈值θTH的取值要根据点云空间分别情况而定,在点云边界平缓的区域,可以相应的设置小一些,在边界点尖锐特征信息点可以设置大一些。
2、主要的成员函数和变量
1、主要成员变量
1)、将点标记为边界点角度阈值
float angle_threshold_;2、主要成员函数
1)、判断当前点是否为边界点
bool
isBoundaryPoint (const pcl::PointCloud<PointInT> &cloud,
int q_idx, const std::vector<int> &indices,
const Eigen::Vector4f &u, const Eigen::Vector4f &v, const float angle_threshold);2)、设置角度阈值
inline void
setAngleThreshold (float angle)3)、计算当前点切平面的坐标系
inline void
getCoordinateSystemOnPlane (const PointNT &p_coeff,
Eigen::Vector4f &u, Eigen::Vector4f &v)3、主要实现代码注解
1)、边界点检测
///1.边界点检测
/
template <typename PointInT, typename PointNT, typename PointOutT> bool
pcl::BoundaryEstimation<PointInT, PointNT, PointOutT>::isBoundaryPoint(
const pcl::PointCloud<PointInT>& cloud, int q_idx,
const std::vector<int>& indices,
const Eigen::Vector4f& u, const Eigen::Vector4f& v,
const float angle_threshold)
{
return (isBoundaryPoint(cloud, cloud.points[q_idx], indices, u, v, angle_threshold));
}
//
template <typename PointInT, typename PointNT, typename PointOutT> bool
pcl::BoundaryEstimation<PointInT, PointNT, PointOutT>::isBoundaryPoint(
const pcl::PointCloud<PointInT>& cloud, const PointInT& q_point,
const std::vector<int>& indices,
const Eigen::Vector4f& u, const Eigen::Vector4f& v,
const float angle_threshold)
{
//邻域点小于3或者无效的点不能识别为边界点
if (indices.size() < 3)
return (false);
if (!std::isfinite(q_point.x) || !std::isfinite(q_point.y) || !std::isfinite(q_point.z))
return (false);
///计算查询点与它邻域点之间的夹角
std::vector<float> angles(indices.size());
float max_dif = FLT_MIN, dif;
int cp = 0;
for (const int& index : indices)
{
//邻域点无效点检测
if (!std::isfinite(cloud.points[index].x) ||
!std::isfinite(cloud.points[index].y) ||
!std::isfinite(cloud.points[index].z))
continue;
Eigen::Vector4f delta = cloud.points[index].getVector4fMap() - q_point.getVector4fMap();
if (delta == Eigen::Vector4f::Zero())
continue;
//在切平面坐标系v,u方向上的投影的角度计算
angles[cp++] = std::atan2(v.dot(delta), u.dot(delta)); // the angles are fine between -PI and PI too
}
if (cp == 0)
return (false);
angles.resize(cp);
//角度排序
std::sort(angles.begin(), angles.end());
// 计算两个连续角度之间的最大夹角差
for (std::size_t i = 0; i < angles.size() - 1; ++i)
{
dif = angles[i + 1] - angles[i];
if (max_dif < dif)
max_dif = dif;
}
// 计算最后一个和第一个的夹角差
dif = 2 * static_cast<float> (M_PI) - angles[angles.size() - 1] + angles[0];
if (max_dif < dif)
max_dif = dif;
// 根据计算的最大角度差和阈值判断是否为边界点
return (max_dif > angle_threshold);
}
//
2)、边界点特征提取
template <typename PointInT, typename PointNT, typename PointOutT> void
pcl::BoundaryEstimation<PointInT, PointNT, PointOutT>::computeFeature(PointCloudOut& output)
{
//最近邻域搜索参数初始化
std::vector<int> nn_indices(k_);
std::vector<float> nn_dists(k_);
//局部坐标系初始化
Eigen::Vector4f u = Eigen::Vector4f::Zero(), v = Eigen::Vector4f::Zero();
output.is_dense = true;
// 稠密点云
if (input_->is_dense)
{
// 执行每一个点
for (std::size_t idx = 0; idx < indices_->size(); ++idx)
{
//最近邻域搜索
if (this->searchForNeighbors((*indices_)[idx], search_parameter_, nn_indices, nn_dists) == 0)
{
output.points[idx].boundary_point = std::numeric_limits<std::uint8_t>::quiet_NaN();
output.is_dense = false;
continue;
}
//获取切平面的坐标系
getCoordinateSystemOnPlane(normals_->points[(*indices_)[idx]], u, v);
//根据角度阈值判断当前点是否为边界点
output.points[idx].boundary_point = isBoundaryPoint(*surface_, input_->points[(*indices_)[idx]], nn_indices, u, v, angle_threshold_);
}
}
else
{
// 执行每一个点
for (std::size_t idx = 0; idx < indices_->size(); ++idx)
{
//最近邻域搜索
if (!isFinite((*input_)[(*indices_)[idx]]) ||
this->searchForNeighbors((*indices_)[idx], search_parameter_, nn_indices, nn_dists) == 0)
{
output.points[idx].boundary_point = std::numeric_limits<std::uint8_t>::quiet_NaN();
output.is_dense = false;
continue;
}
//获取切平面的坐标系
getCoordinateSystemOnPlane(normals_->points[(*indices_)[idx]], u, v);
//根据角度阈值判断当前点是否为边界点
output.points[idx].boundary_point = isBoundaryPoint(*surface_, input_->points[(*indices_)[idx]], nn_indices, u, v, angle_threshold_);
}
}
}4、实例代码
/*****************************************************************//**
* \file PCLBoundarymain.cpp
* \brief 边界特征点检测
*
* \author HP
* \date January 2025
*********************************************************************/
#include <iostream>
#include <math.h>
#include <pcl/io/auto_io.h>
#include <pcl/point_types.h>
#include <pcl/point_cloud.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/features/normal_3d.h>
#include <pcl/features/boundary.h>
#include <pcl/kdtree/kdtree_flann.h>
void estimateBorders()
{
//加载点云数据
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZRGB>());
std::string fileName = "E:/fragment.pcd";
pcl::io::load(fileName, *cloud);
std::cout << "Cloud Size:" << cloud->points.size() << std::endl;
pcl::NormalEstimation<pcl::PointXYZRGB, pcl::Normal> norEst;
pcl::PointCloud<pcl::Normal>::Ptr normals(new pcl::PointCloud<pcl::Normal>);
norEst.setInputCloud(cloud);
norEst.setRadiusSearch(0.04);
norEst.compute(*normals);
//边界特征点提取
pcl::BoundaryEstimation<pcl::PointXYZRGB, pcl::Normal, pcl::Boundary> boundEst;
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud_boundary(new pcl::PointCloud<pcl::PointXYZRGB>);
boundEst.setInputCloud(cloud);
boundEst.setInputNormals(normals);
boundEst.setRadiusSearch(0.08);
boundEst.setAngleThreshold(M_PI / 4);
boundEst.setSearchMethod(pcl::search::KdTree<pcl::PointXYZRGB>::Ptr(new pcl::search::KdTree<pcl::PointXYZRGB>));
//保存边界结果
pcl::PointCloud<pcl::Boundary> boundaries;
boundEst.compute(boundaries);
//保存边界点结果用于可视化
for (int i = 0; i < cloud->points.size(); ++i)
{
if (boundaries[i].boundary_point > 0){
cloud_boundary->push_back(cloud->points[i]);
}
}
boost::shared_ptr<pcl::visualization::PCLVisualizer> View(new pcl::visualization::PCLVisualizer("点云库PCL从入门到精通案例"));
//创建可视化窗口和设置窗口的背景颜色
int v1(0);
View->createViewPort(0.0, 0.0, 0.5, 1.0, v1);
View->setBackgroundColor(0.3, 0.3, 0.3, v1);
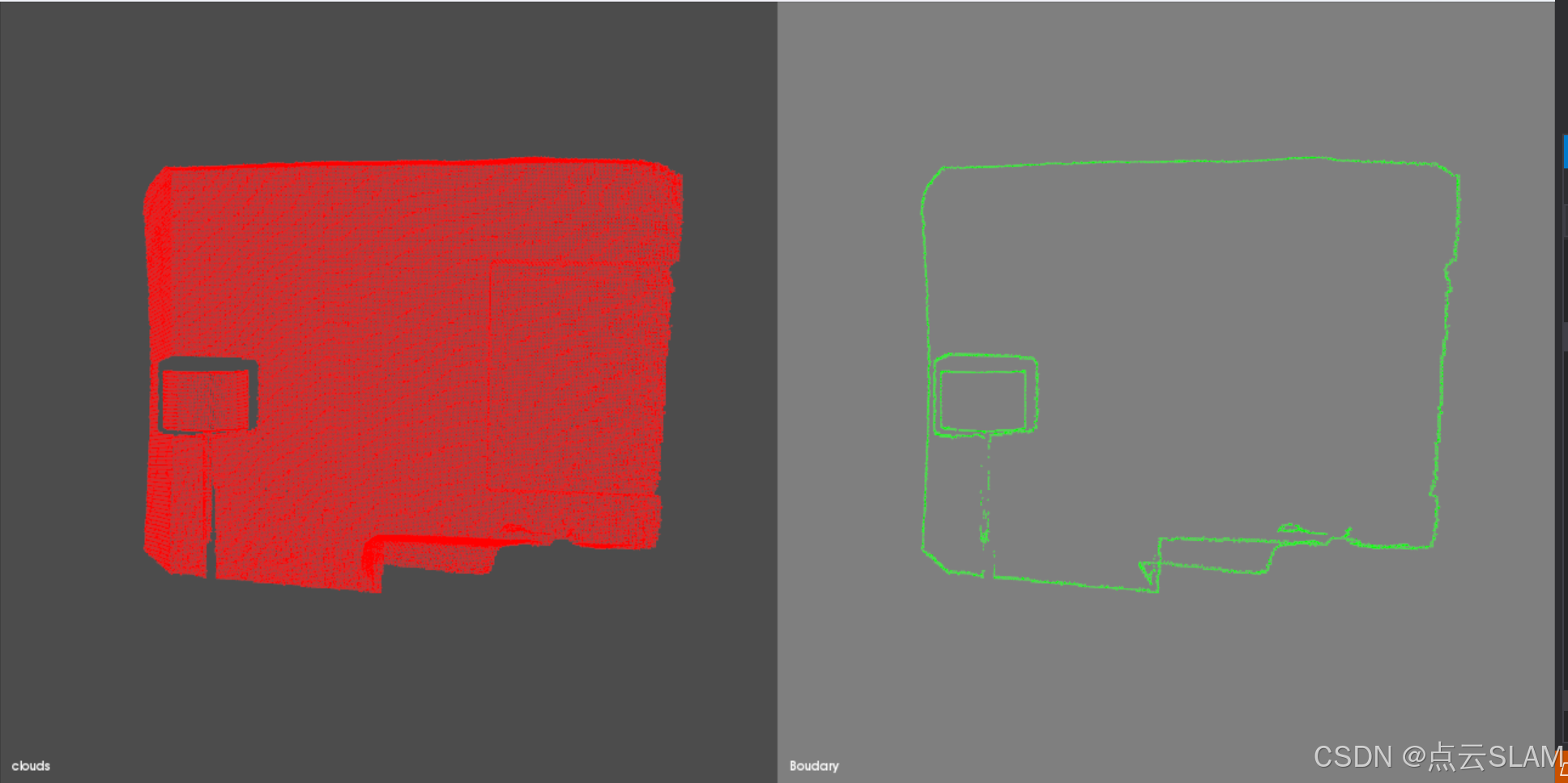
View->addText("clouds", 10, 10, "v1_text", v1);
int v2(0);
View->createViewPort(0.5, 0.0, 1, 1.0, v2);
View->setBackgroundColor(0.5, 0.5, 0.5, v2);
View->addText("Boudary", 10, 10, "v2_text", v2);
//添加点云和边界点云
View->addPointCloud<pcl::PointXYZRGB>(cloud, "cloud", v1);
View->addPointCloud<pcl::PointXYZRGB>(cloud_boundary, "boundaryCloud", v2);
//可视化点云属性
View->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 1, 0, 0, "cloud", v1);
View->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 0, 1, 0, "boundaryCloud", v2);
//添加坐标系
View->addCoordinateSystem(0.5);
View->initCameraParameters();
View->spin();
return ;
}
int
main(int argc, char** argv)
{
estimateBorders();
std::cout << "Hello PCL World!" << std::endl;
std::system("pause");
return 0;
}结果展示:
至此完成第十七节PCL库点云特征之边界点特征的学习,下一节我们将进入《PCL库中点云关键点之深度图提取边界》的学习。 这是年前的最后一篇了,提前祝福大家新春快乐,感谢大家的支持。


















 769
769

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











